An ICP variant using a point-to-line metric.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Pasadena, CA, May 2008.
 pdfdoi
pdfdoi supp. material
supp. material slides
slides


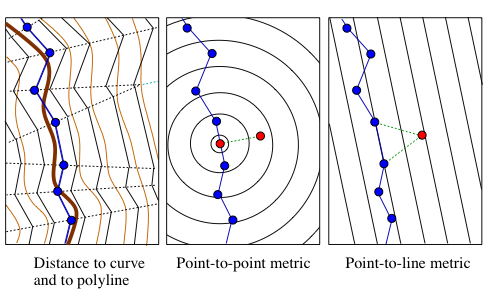
Abstract -- This paper describes PLICP, an ICP (Iterative Closest/Corresponding Point) variant that uses a point-to-line metric, and an exact closed-form for minimizing such metric. The resulting algorithm has some interesting properties: it converges quadratically, and in a finite number of steps. The method is validated against vanilla ICP, IDC (Iterative Dual Correspondences), and MbICP (Metric-Based ICP) by reproducing the experiments performed in Minguez et al. (2006). The experiments suggest that PLICP is more precise, and requires less iterations. However, it is less robust to very large initial displacement errors. The last part of the paper is devoted to purely algorithmic optimization of the correspondence search; this allows for significant speed-up of the computation. The source code is available for download.
Additional material
Source code:
- Implemented in C as part of the Canonical Scan Matcher package.
- The core function, which minimizes the point-to-line metric, is also available separately in C, Matlab, and Ruby, here.
Dataset used for the experiments (provided by Javier Minguez):
- Original log: original format, Carmen format
- Scan matched with PLICP: Carmen format, PDF
Animations used in the video in PDF format:

Note that the software for creating these animations is bundled in
the CSM package; the program is called icp_sm_animate, see
the documentation therein.