A comparison of algorithms for likelihood approximation in bayesian localization.
Technical Report, Sapienza Universita di Roma, 2006.
 pdf
pdf supp. material
supp. material

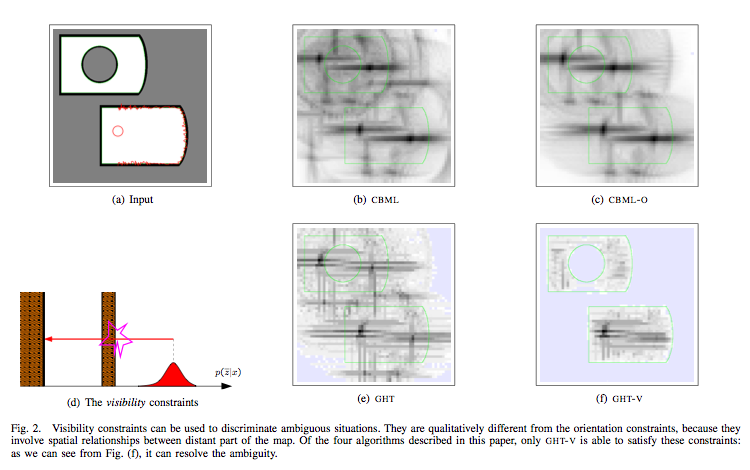
Abstract -- Global localization is the problem of estimating the robot's pose, without any previous information, in a world which is known. Bayesian filters (either grid- or particle-based), need to evaluate the likelihood of a sensor reading given a pose hypothesis. For a laser range finder the computation is expensive and therefore approximations to the true likelihood that do not require a ray-tracing are usually employed. Nevertheless, these approximations do not satisfy those that in this paper we identify as orientation and visibility constraints. This paper proposes more accurate algorithms which solve, in part or completely, these problems and are faster and have better complexity than existing methods.