Calibration
Andrea Censi and Davide Scaramuzza.
Calibration by correlation using metric embedding from non-metric similarities.
IEEE Transactions on Pattern Analysis and Machine Intelligence, 35:2357–2370, 10 2013.
 pdfdoi
pdfdoi supp. material
supp. material
bibtex
@article{censi12cameracalib,
author = "Censi, Andrea and Scaramuzza, Davide",
olddescicon = "https://censi.science/media/paper-icons/censi12cameracalib_preprint.png",
doi = "10.1109/TPAMI.2013.34",
title = "Calibration by correlation using metric embedding from non-metric similarities",
url = "http://purl.org/censi/2012/camera_calibration",
journal = "IEEE Transactions on Pattern Analysis and Machine Intelligence",
month = "10",
volume = "35",
year = "2013",
pdf = "http://purl.org/censi/research/preprints/camera_calibration/2012-camera_calibration.pdf",
issue = "10",
pages = "2357--2370"
}
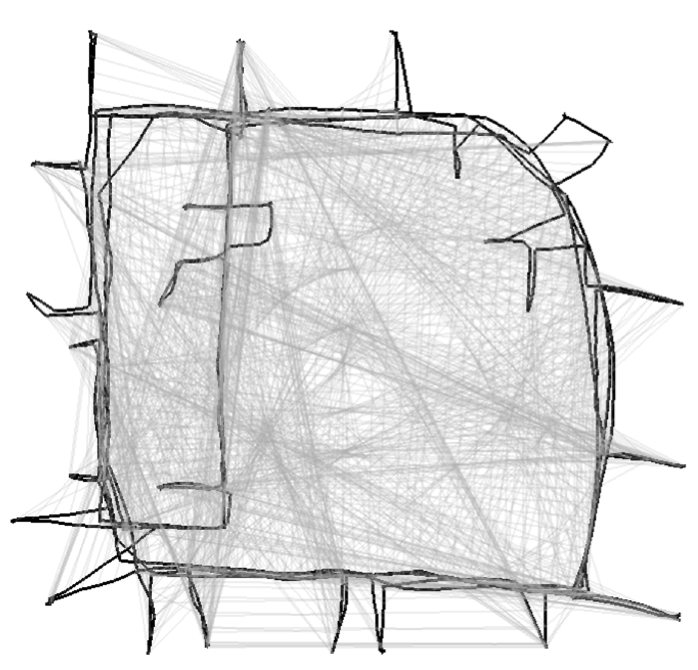
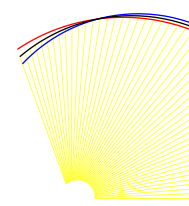
Davide and I explain how to calibrate a generic single-view-point camera
by only waving it around.
read more...

Andrea Censi, Adam Nilsson, and Richard M. Murray.
Motion planning in observations space with learned diffeomorphism models.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2860–2867. Karlsruhe, Germany, 5 2013.
pdfdoi supp. material
bibtex
@inproceedings{censi13motion,
author = "Censi, Andrea and Nilsson, Adam and Murray, Richard M.",
doi = "10.1109/ICRA.2013.6630973",
title = "Motion planning in observations space with learned diffeomorphism models.",
url = "http://purl.org/censi/2012/dptr1",
booktitle = "Proceedings of the {IEEE} International Conference on Robotics and Automation ({ICRA})",
year = "2013",
month = "5",
pages = "2860--2867",
address = "Karlsruhe, Germany",
pdf = "http://purl.org/censi/research/2012-dptr1.pdf",
abstract = "We consider the problem of planning motions in observations space, based on learned models of the dynamics that associate to each action a diffeomorphism of the obser- vations domain. For an arbitrary set of diffeomorphisms, this problem must be formulated as a generic search problem. We adapt established algorithms of the graph search family. In this scenario, node expansion is very costly, as each node in the graph is associated to an uncertain diffeomorphism and corresponding predicted observations. We describe several improvements that ameliorate performance: the introduction of better image similarities to use as heuristics; a method to reduce the number of expanded nodes by preliminarily identifying redundant plans; and a method to pre-compute composite actions that make the search efficient in all directions."
}
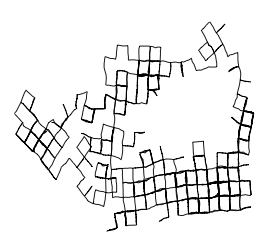
Using learned diffeomorphism models of the dynamics of cameras and range-finders,
we formulate motion planning as a planning problem in the observations space.
Nodes/states are (uncertain) images; actions/edges are (uncertain) diffeomorphisms.
read more...
Localization/SLAM
Luca Carlone, Andrea Censi, and Frank Dellaert.
Coherent measurements selection via l1 relaxation: an approach to robust estimation over graphs.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). October 2014.
bibtex
@inproceedings{carlone14coherent_sub,
author = "Carlone, Luca and Censi, Andrea and Dellaert, Frank",
title = "Coherent Measurements Selection via l1 Relaxation: an Approach to Robust Estimation over Graphs",
abstract = "",
month = "October",
year = "2014",
booktitle = "IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)"
}
Luca, Frank
and I show how outliers in planar pose graph optimization
can be detected using convex relaxation. This builds on previous papers showing
that planar pose graph optimization can be decoupled in linear problems (with a few tricks).
Luca Carlone and Andrea Censi.
From Angular Manifolds to the Integer Lattice: Guaranteed Orientation Estimation with Application to Pose Graph Optimization.
IEEE Transactions on Robotics, April 2014.
pdfdoi supp. material slides
slides
bibtex
@article{carlone14angular,
author = "Carlone, Luca and Censi, Andrea",
volume = "30",
doi = "10.1109/TRO.2013.2291626",
title = "{From Angular Manifolds to the Integer Lattice: Guaranteed Orientation Estimation with Application to Pose Graph Optimization}",
url = "http://www.lucacarlone.com/index.php/resources/research/mole2d",
journal = "IEEE Transactions on Robotics",
number = "4",
month = "April",
slides = "http://purl.org/censi/research/2013-mole2d-slides.pdf",
year = "2014",
pdf = "http://purl.org/censi/research/2013-mole2d.pdf"
}
Pose optimization is what is used in SLAM to optimize the map
after pose-pose and pose-features correspondences have been established.
The variables in this problem are poses living
on the nodes of a graph, and measurements are relative measurements
along the graph edges. The
problem is hard because orientations live on a manifold
with nontrivial topology, which makes the problem
nonlinear, nonconvex, and with multiple minima.
Luca and I try to solve the subproblem of orientation estimation.
We find a way to convert
the problem to an unconstrained optimization problem on integers.
This makes it possible to solve the problem globally
and return all likely guesses for the orientation.
read more...
Paloma Puente and Andrea Censi.
Dense map inference with user-defined priors: from priorlets to scan eigenvariations.
In Cyrill Stachniss, Kerstin Schill, and David Uttal, editors, Spatial Cognition VIII, volume 7463 of Lecture Notes in Computer Science, 94–113. Springer Berlin Heidelberg, August 2012.
pdfdoi slides
bibtex
@inproceedings{delapuente12dense,
editor = "Stachniss, Cyrill and Schill, Kerstin and Uttal, David",
author = "Puente, Paloma and Censi, Andrea",
volume = "7463",
publisher = "Springer Berlin Heidelberg",
doi = "10.1007/978-3-642-32732-2_6",
isbn = "978-3-642-32731-5",
title = "Dense Map Inference with User-Defined Priors: From Priorlets to Scan Eigenvariations",
series = "Lecture Notes in Computer Science",
booktitle = "Spatial Cognition VIII",
month = "August",
slides = "http://purl.org/censi/research/2012-structprior-slides.pdf",
year = "2012",
pdf = "http://authors.library.caltech.edu/28143/1/report.pdf",
pages = "94-113"
}
Paloma and I
study how to integrate in the mapping problem
"rich" information about the environment structure. We use the concept
of priorlets to capture a variety of environment priors. We recover
the map by optimizing at the same time for continuous and discrete
variables (measurements and topology, respectively).

Davide Scaramuzza, Andrea Censi, and Kostas Daniilidis.
Exploiting motion priors in visual odometry for vehicle-mounted cameras with non-holonomic constraints.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). San Francisco, CA, September 2011.
pdfdoi
bibtex
@inproceedings{scaramuzza11visodo,
author = "Scaramuzza, Davide and Censi, Andrea and Daniilidis, Kostas",
doi = "10.1109/IROS.2011.6095123",
title = "Exploiting motion priors in visual odometry for vehicle-mounted cameras with non-holonomic constraints",
booktitle = "{IEEE/RSJ} International Conference on Intelligent Robots and Systems (IROS)",
year = "2011",
month = "September",
address = "San Francisco, CA",
pdf = "http://purl.org/censi/research/2011-iros-scaRansac.pdf"
}
Fast and precise visual odometry by exploiting the motion priors
specific to the dynamics of a car.

Andrea Censi.
On achievable accuracy for pose tracking.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Kobe, Japan, May 2009.
pdfdoi supp. material slides
bibtex
@inproceedings{censi09posetracking,
author = "Censi, Andrea",
doi = "10.1109/ROBOT.2009.5152236",
title = "On achievable accuracy for pose tracking",
url = "http://purl.org/censi/2008/posetracking",
booktitle = "Proceedings of the {IEEE} International Conference on Robotics and Automation ({ICRA})",
year = "2009",
month = "May",
slides = "http://purl.org/censi/research/2009-icra-posetracking-slides.pdf",
address = "Kobe, Japan",
pdf = "http://purl.org/censi/research/2009-icra-posetracking.pdf",
abstract = "This paper presents Cramer-Rao bound-like inequalities for pose tracking, which is defined as the problem of recovering the robot displacement given two successive readings of a relative sensor. Computing the exact Fisher Information Matrix (FIM) for pose tracking is hard, because the state comprises the map, which is infinite-dimensional and unknown. This paper shows that the FIM for pose tracking can be bounded by a function of the FIM for localization on a known map, thereby reducing the analysis to a finite-dimensional problem. The resulting bounds are independent of the map prior and representation. The results are valid for any relative sensor; the experimental verification is done for the particular case of pose tracking using range-finders (scan matching)."
}
In principle, how precise can a scan-matching method be? This paper
gives a very simple relation between the achievable accuracy for
localization (when the map is known) and the accuracy for scan-matching
(when the map is not known).
read more...
Stefano Carpin and Andrea Censi.
An experimental assessment of the hsm3d algorithm for sparse and colored data.
In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 3595–3600. St. Louis, MO, October 2009.
doi
bibtex
@inproceedings{carpin09hsm3d,
author = "Carpin, Stefano and Censi, Andrea",
doi = "10.1109/IROS.2009.5354618",
title = "An experimental assessment of the HSM3D algorithm for sparse and colored data",
booktitle = "Proceedings of the {IEEE/RSJ} International Conference on Intelligent Robots and Systems (IROS)",
year = "2009",
month = "October",
address = "St. Louis, MO",
pages = "3595-3600"
}

Andrea Censi and Stefano Carpin.
HSM3D: feature-less global 6DOF scan-matching in the Hough/Radon domain.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Kobe, Japan, May 2009.
pdfdoi supp. material slides
bibtex
@inproceedings{censi09hsm3d,
author = "Censi, Andrea and Carpin, Stefano",
doi = "10.1109/ROBOT.2009.5152431",
title = "{HSM3D}: Feature-Less Global {6DOF} Scan-Matching in the {H}ough/{R}adon Domain",
url = "http://purl.org/censi/2008/hsm3d",
booktitle = "Proceedings of the {IEEE} International Conference on Robotics and Automation ({ICRA})",
year = "2009",
month = "May",
slides = "http://purl.org/censi/research/2009-icra-hsm3d-slides.pdf",
address = "Kobe, Japan",
pdf = "http://purl.org/censi/research/2009-icra-hsm3d.pdf",
abstract = "This paper presents HSM3D, an algorithm for global rigid6DOF alignment of 3D point clouds. The algorithm works byprojecting the two input sets into the Radon/Hough domain,whose properties allow to decompose the 6DOF search into aseries of fast one-dimensional cross-correlations. Noplanes or other particular features must be present in theinput data, and the algorithm is provably complete in thecase of noise-free input. The algorithm has beenexperimentally validated on publicly available data sets."
}

Andrea Censi.
An ICP variant using a point-to-line metric.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Pasadena, CA, May 2008.
pdfdoi supp. material slides
bibtex
@inproceedings{censi08plicp,
author = "Censi, Andrea",
doi = "10.1109/ROBOT.2008.4543181",
title = "An {ICP} variant using a point-to-line metric",
url = "http://purl.org/censi/2007/plicp",
booktitle = "Proceedings of the {IEEE} International Conference on Robotics and Automation ({ICRA})",
year = "2008",
month = "May",
slides = "http://purl.org/censi/research/2008-icra-plicp-slides.pdf",
address = "Pasadena, CA",
pdf = "http://purl.org/censi/research/2008-icra-plicp.pdf",
abstract = "This paper describes PLICP, an ICP (Iterative Closest/Corresponding Point) variant that uses a point-to-line metric, and an exact closed-form for minimizing such metric. The resulting algorithm has some interesting properties: it converges quadratically, and in a finite number of steps. The method is validated against vanilla ICP, IDC (Iterative Dual Correspondences), and MbICP (Metric-Based ICP) by reproducing the experiments performed in Minguez et al. (2006). The experiments suggest that PLICP is more precise, and requires less iterations. However, it is less robust to very large initial displacement errors. The last part of the paper is devoted to purely algorithmic optimization of the correspondence search; this allows for significant speed-up of the computation. The source code is available for download."
}

Andrea Censi and Gian Diego Tipaldi.
Lazy localization using the Frozen-Time Smoother.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Pasadena, CA, May 2008.
pdfdoi supp. material
bibtex
@inproceedings{censi08fts,
author = "Censi, Andrea and Tipaldi, Gian Diego",
doi = "10.1109/ROBOT.2008.4543631",
title = "Lazy Localization using the {F}rozen-{T}ime {S}moother",
url = "http://purl.org/censi/2007/fts",
booktitle = "Proceedings of the {IEEE} International Conference on Robotics and Automation ({ICRA})",
year = "2008",
month = "May",
address = "Pasadena, CA",
pdf = "http://purl.org/censi/research/2008-icra-fts.pdf",
abstract = "We present a new algorithm for solving the global localization problem called Frozen-Time Smoother (FTS). Time is `frozen', in the sense that the belief always refers to the same time instant, instead of following a moving target, like Monte Carlo Localization does. This algorithm works in the case in which global localization is formulated as a smoothing problem, and a precise estimate of the incremental motion of the robot is usually available. These assumptions correspond to the case when global localization is used to solve the loop closing problem in SLAM. We compare FTS to two Monte Carlo methods designed with the same assumptions. The experiments suggest that a naive implementation of the FTS is more efficient than an extremely optimized equivalent Monte Carlo solution. Moreover, the FTS has an intrinsic laziness: it does not need frequent updates (scans can be integrated once every many meters) and it can process data in arbitrary order. The source code and datasets are available for download."
}
Global localization without the worries and anxiety of filtering.
read more...

Andrea Censi.
An accurate closed-form estimate of ICP's covariance.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 3167–3172. Rome, Italy, April 2007.
pdfdoi supp. material slides
bibtex
@inproceedings{censi07accurate,
author = "Censi, Andrea",
doi = "10.1109/ROBOT.2007.363961",
title = "An accurate closed-form estimate of {ICP}'s covariance",
url = "http://purl.org/censi/2006/icpcov",
year = "2007",
booktitle = "Proceedings of the {IEEE} International Conference on Robotics and Automation ({ICRA})",
issn = "1050-4729",
month = "April",
slides = "http://purl.org/censi/research/2007-icra-icpcov-slides.pdf",
pages = "3167--3172",
address = "Rome, Italy",
pdf = "http://purl.org/censi/research/2007-icra-icpcov.pdf",
abstract = "Existing methods for estimating the covariance of the ICP (Iterative Closest/Corresponding Point) algorithm are either inaccurate or are computationally too expensive to be used online. This paper proposes a new method, based on the analysis of the error function being minimized. It considers that the correspondences are not independent (the same measurement being used in more than one correspondence), and explicitly utilizes the covariance matrix of the measurements, which are not assumed to be independent either. The validity of the approach is verified through extensive simulations: it is more accurate than previous methods and its computational load is negligible. The ill-posedness of the surface matching problem is explicitly tackled for under-constrained situations by performing an observability analysis; in the analyzed cases the method still provides a good estimate of the error projected on the observable manifold."
}
This paper describes a proper way to compute the covariance of
an ICP estimate, which is shown to be superior to the existing algernatives.
read more...

Andrea Censi.
On achievable accuracy for range-finder localization.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 4170–4175. Rome, Italy, April 2007.
pdfdoi supp. material slides
bibtex
@inproceedings{censi07achievable,
author = "Censi, Andrea",
doi = "10.1109/ROBOT.2007.364120",
title = "On achievable accuracy for range-finder localization",
url = "http://purl.org/censi/2006/accuracy",
year = "2007",
booktitle = "Proceedings of the {IEEE} International Conference on Robotics and Automation ({ICRA})",
issn = "1050-4729",
month = "April",
slides = "http://purl.org/censi/research/2007-icra-accuracy-slides.pdf",
pages = "4170--4175",
address = "Rome, Italy",
pdf = "http://purl.org/censi/research/2007-icra-accuracy.pdf",
abstract = "The covariance of every unbiased estimator is bounded by the Cramer-Rao lower bound, which is the inverse of Fisher's information matrix. This paper shows that, for the case of localization with range-finders, Fisher's matrix is a function of the expected readings and of the orientation of the environment's surfaces at the sensed points. The matrix also offers a mathematically sound way to characterize under- constrained situations as those for which it is singular: in those cases the kernel describes the direction of maximum uncertainty. This paper also introduces a simple model of unstructured environments for which the Cramer-Rao bound is a function of two statistics of the shape of the environment: the average radius and a measure of the irregularity of the surfaces. Although this model is not valid for all environments, it allows for some interesting qualitative considerations. As an experimental validation, this paper reports simulations comparing the bound with the actual performance of the ICP (Iterative Closest/Corresponding Point) algorithm. Finally, it is discussed the difficulty in extending these results to find a lower bound for accuracy in scan matching and SLAM."
}
How precise can a localization method be? This paper derives the
Cramer-Rao lower bound for localization with range finders.
read more...

Andrea Censi.
Scan matching in a probabilistic framework.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2291–2296. Orlando, Florida, May 2006.
pdfdoi supp. material slides
bibtex
@inproceedings{censi06scan,
author = "Censi, Andrea",
doi = "10.1109/ROBOT.2006.1642044",
title = "Scan matching in a probabilistic framework",
url = "http://purl.org/censi/2006/gpm",
booktitle = "Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)",
year = "2006",
month = "May",
slides = "http://purl.org/censi/research/2006-icra-gpm-slides.pdf",
address = "Orlando, Florida",
pdf = "http://purl.org/censi/research/2006-icra-gpm.pdf",
pages = "2291--2296"
}

Andrea Censi, Luca Iocchi, and Giorgio Grisetti.
Scan matching in the Hough domain.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2739–2744. Barcelona, Spain, 2005.
pdfdoi supp. material slides
bibtex
@inproceedings{censi05hough,
author = "Censi, Andrea and Iocchi, Luca and Grisetti, Giorgio",
doi = "10.1109/ROBOT.2005.1570528",
title = "Scan matching in the {H}ough domain",
url = "http://purl.org/censi/2006/hsm",
booktitle = "Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)",
year = "2005",
slides = "http://purl.org/censi/research/2005-icra-hsm-slides.ppt",
address = "Barcelona, Spain",
pdf = "http://purl.org/censi/research/2005-icra-hsm.pdf",
pages = "2739--2744"
}
A global, complete algorithm for scan matching based on the Hough/Radon
transform. This was my Bachelor's thesis.
read more...