For a summary of my main research interests,
see
a recent presentation about my work.
Legend:
 slides presented at a conference or other meeting;
slides presented at a conference or other meeting;
 datasets or source code.
datasets or source code.
Please feel free to ask for a PDF if it is not linked here.
Preprints / Working papers
Any feedback on preprints is greatly appreciated! The quantum of feedback you can give is something along the lines of "I stopped reading because I got lost at point X".
Andrea Censi.
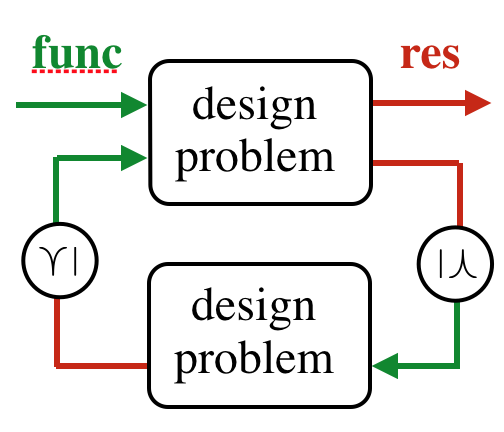
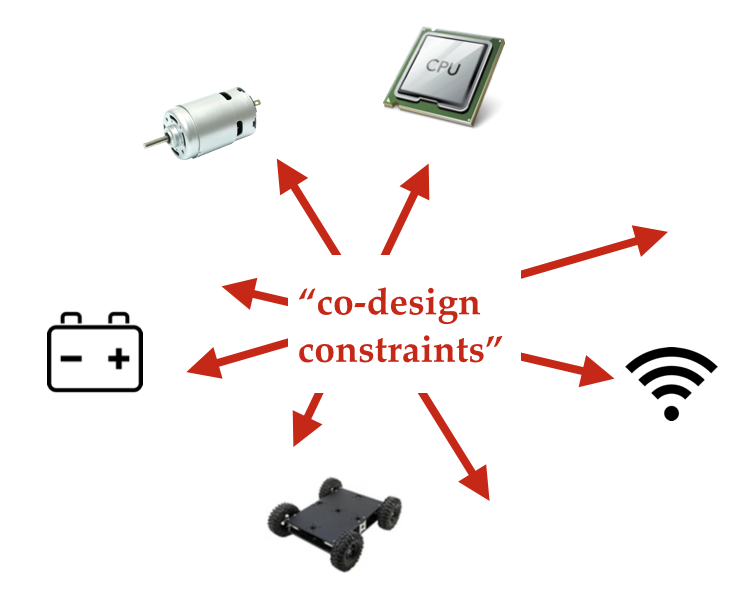
A mathematical theory of co-design.
Technical Report, Laboratory for Information and Decision Systems, MIT, September 2016.
Submitted and conditionally accepted to IEEE Transactions on Robotics.
 pdf supp. material
pdf supp. material
bibtex
@techreport{censi16codesign,
author = "Censi, Andrea",
title = "A Mathematical Theory of Co-Design",
url = "https://arxiv.org/abs/1512.08055",
month = "September",
note = "Submitted and conditionally accepted to IEEE Transactions on Robotics",
year = "2016",
pdf = "https://arxiv.org/pdf/1512.08055",
institution = "Laboratory for Information and Decision Systems, MIT"
}
This paper introduces a theory of co-design that describes "design problems", defined as tuples of "functionality space", "implementation space", and "resources space", together with a feasibility relation that relates the three spaces. Design problems can be interconnected together to create "co-design problems", which describe possibly recursive co-design constraints among subsystems.
read more...
Journal papers

Andrea Censi.
Uncertainty in monotone co-design problems.
IEEE Robotics and Automation Letters, February 2017.
pdf supp. material
bibtex
@article{censi17uncertainty,
author = "Censi, Andrea",
title = "Uncertainty in Monotone Co-Design Problems",
url = "https://arxiv.org/abs/1609.03103",
journal = "IEEE Robotics and Automation Letters",
month = "February",
year = "2017",
pdf = "https://arxiv.org/pdf/1609.03103"
}
This paper concerns the introduction of uncertainty in the MCDP framework. Uncertainty has two roles: first, it allows to deal with limited knowledge in the models; second, it also can be used to generate consistent relaxations of a problem, as the computation requirements can be lowered should the user accept some uncertainty in the answer.
read more...

Andrea Censi.
A class of co-design problems with cyclic constraints and their solution.
IEEE Robotics and Automation Letters, 2(1):96–103, Jan 2016.
Superseded by preprint ``A Mathematical Theory of Co-Design''.
doi
bibtex
@article{censi15monotone,
author = "Censi, Andrea",
note = "Superseded by preprint ``A Mathematical Theory of Co-Design''.",
doi = "10.1109/LRA.2016.2535127",
nourl = "https://co-design.science/",
title = "A Class of Co-Design Problems With Cyclic Constraints and Their Solution",
journal = "IEEE Robotics and Automation Letters",
issn = "2377-3766",
number = "1",
month = "Jan",
volume = "2",
year = "2016",
keywords = "Batteries;Extraterrestrial measurements;Payloads;Robot sensing systems;Foundations of Automation;Optimization and Optimal Control",
ignorepdf = "https://purl.org/censi/research/201510-monotone/1-MonotoneCodesign.pdf",
pages = "96-103"
}
Superseded by preprint ``A Mathematical Theory of Co-Design''.
Andrea Censi and Richard M. Murray.
Bootstrapping bilinear models of Simple Vehicles.
International Journal of Robotics Research, 34:1087–1113, July 2015.
pdfdoi video supp. material slides
video supp. material slides
bibtex
@article{censi13jbds_sub,
author = "Censi, Andrea and Murray, Richard M.",
slides = "https://purl.org/censi/research/2013-jbds-slides.pdf",
doi = "10.1177/0278364914557708",
slideskeynote = "https://purl.org/censi/research/2013-jbds-slides.key.zip",
title = "{Bootstrapping bilinear models of Simple Vehicles}",
url = "https://purl.org/censi/2013/jbds",
journal = "International Journal of Robotics Research",
year = "2015",
month = "July",
volume = "34",
video = "https://vimeo.com/80954603",
pages = "1087--1113",
sortyear = "2015",
pdf = "https://purl.org/censi/research/2013-jbds-sub.pdf",
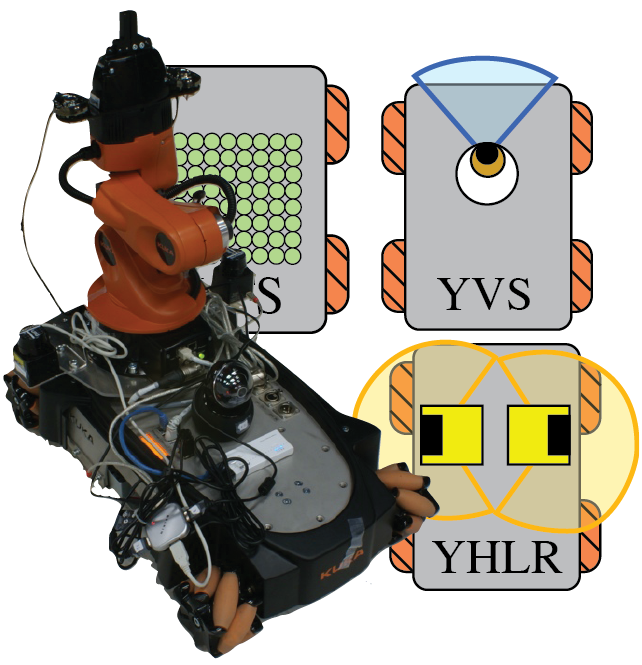
abstract = {Learning and adaptivity will play a large role in robotics in the future, as robots transition from unstructured to unstructured environments that cannot be fully predicted or understood by the designer. Two questions that are open are how much it is possible to learn, and how much we should learn. The goal of bootstrapping is creating agents that are able to learn "everything" from scratch, including a torque-to-pixels models for its robotic body. Systems with such capabilities will be advantaged in terms of being resilient to unforeseen changes and deviations from prior assumptions. The robotics domain is a challenging one for learning, due to the presence of high-dimensional signals, various nonlinearities, and hidden states. There are no formal results, in the spirit of control theory, that could give guarantees. This paper considers the bootstrapping problem for a subset of the set of all robots. The Vehicles, inspired by Braitenberg's work, are idealization of mobile robots equipped with a set of “canonical” exteroceptive sensors (camera; range-finder; field-sampler). Their sensel-level dynamics are derived and shown to be surprising close. We define the class of BDS models, which assume an instantaneous bilinear dynamics between observations and commands, and derive streaming-based bilinear strategies for them. We show in what sense the BDS dynamics approximates the set of Vehicles to guarantee success in the task of generalized servoing: driving the observations to a given goal snapshot. Simulations and experiments substantiate the theoretical results. This is the first instance of a bootstrapping agent that can learn the dynamics of a relatively large universe of systems, and use the models to solve well-defined tasks, with no parameter tuning or hand-designed features.}
}
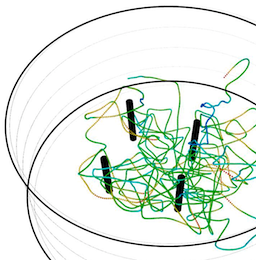
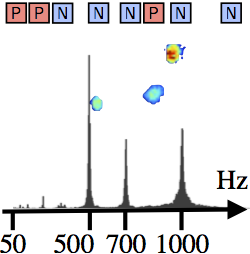
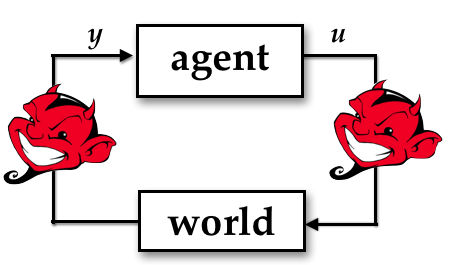
For a bootstrapping agent connected to an unknown body, the "world" is the series of the unknown actuators, the external environment, and the unknown sensors.
One ability that a bootstrapping agent needs is estimating a predictive model of the observations
as a function of the commands. This paper considers the sensorimotor dynamics learning problem for a subset of the "set of all robots" called the Simple Vehicles, which are the idealization of mobile robots equipped with one of the three exteroceptive sensors: field-sampler, vision sensor, and range-finder.
read more...
Sawyer B. Fuller, Michael Karpelson, Andrea Censi, Kevin Y. Ma, and Robert J. Wood.
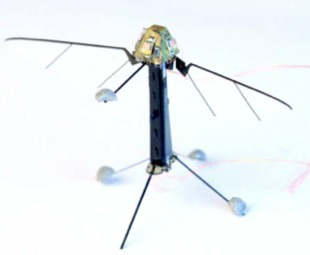
Controlling free flight of a robotic fly using an onboard vision sensor inspired by insect ocelli.
Journal of the Royal Society Interface, August 2014.
video supp. material
bibtex
@article{fuller14controlling,
author = "Fuller, Sawyer B. and Karpelson, Michael and Censi, Andrea and Ma, Kevin Y. and Wood, Robert J.",
title = "Controlling free flight of a robotic fly using an onboard vision sensor inspired by insect ocelli",
url = "http://rsif.royalsocietypublishing.org/content/11/97/20140281",
journal = "Journal of the Royal Society Interface",
year = "2014",
number = "97",
month = "August",
vol = "11",
video = "http://www.youtube.com/watch?v=iMjaIkMxUqQ",
sortyear = "2015",
doi-old = "10.1098/rsif.2014.0281"
}
This paper describes the first sensory-controlled flight of the Robobee.
The Robobee is able to stabilize itself using the feedback from
a sensor inspired by the insects' ocelli.
read more...
Luca Carlone and Andrea Censi.
From Angular Manifolds to the Integer Lattice: Guaranteed Orientation Estimation with Application to Pose Graph Optimization.
IEEE Transactions on Robotics, April 2014.
pdfdoi supp. material slides
bibtex
@article{carlone14angular,
author = "Carlone, Luca and Censi, Andrea",
volume = "30",
doi = "10.1109/TRO.2013.2291626",
title = "{From Angular Manifolds to the Integer Lattice: Guaranteed Orientation Estimation with Application to Pose Graph Optimization}",
url = "http://www.lucacarlone.com/index.php/resources/research/mole2d",
journal = "IEEE Transactions on Robotics",
number = "4",
month = "April",
slides = "http://purl.org/censi/research/2013-mole2d-slides.pdf",
year = "2014",
pdf = "http://purl.org/censi/research/2013-mole2d.pdf"
}
Pose optimization is what is used in SLAM to optimize the map
after pose-pose and pose-features correspondences have been established.
The variables in this problem are poses living
on the nodes of a graph, and measurements are relative measurements
along the graph edges. The
problem is hard because orientations live on a manifold
with nontrivial topology, which makes the problem
nonlinear, nonconvex, and with multiple minima.
Luca and I try to solve the subproblem of orientation estimation.
We find a way to convert
the problem to an unconstrained optimization problem on integers.
This makes it possible to solve the problem globally
and return all likely guesses for the orientation.
read more...
Andrea Censi and Davide Scaramuzza.
Calibration by correlation using metric embedding from non-metric similarities.
IEEE Transactions on Pattern Analysis and Machine Intelligence, 35:2357–2370, 10 2013.
pdfdoi supp. material
bibtex
@article{censi12cameracalib,
author = "Censi, Andrea and Scaramuzza, Davide",
olddescicon = "https://censi.science/media/paper-icons/censi12cameracalib_preprint.png",
doi = "10.1109/TPAMI.2013.34",
title = "Calibration by correlation using metric embedding from non-metric similarities",
url = "http://purl.org/censi/2012/camera_calibration",
journal = "IEEE Transactions on Pattern Analysis and Machine Intelligence",
month = "10",
volume = "35",
year = "2013",
pdf = "http://purl.org/censi/research/preprints/camera_calibration/2012-camera_calibration.pdf",
issue = "10",
pages = "2357--2370"
}
Davide and I explain how to calibrate a generic single-view-point camera
by only waving it around.
read more...
Andrea Censi*, Andrew D. Straw*, Rosalyn W. Sayaman, Richard M. Murray, and Michael H. Dickinson.
Discriminating external and internal causes for saccade initiation in freely flying Drosophila.
PLOS Computational Biology, February 2013.
pdfdoi supp. material slides
bibtex
@article{censi13saccade,
author = "Censi*, Andrea and Straw*, Andrew D. and Sayaman, Rosalyn W. and Murray, Richard M. and Dickinson, Michael H.",
volume = "9",
doi = "10.1371/journal.pcbi.1002891",
title = "Discriminating external and internal causes for saccade initiation in freely flying {\em Drosophila}",
url = "http://purl.org/censi/2011/saccade",
abstract = "As animals move through the world in search of resources, they change course in reaction to both external sensory cues and internally- generated programs. Elucidating the functional logic of complex search algorithms is challenging because the observable actions of the animal cannot be unambiguously assigned to externally- or internally-triggered events. We present a technique that addresses this challenge by assessing quantitatively the contribution of external stimuli and internal processes. We apply this technique to the analysis of rapid turns (saccades) of freely flying Drosophila melanogaster. We show that a single scalar feature computed from the visual stimulus experienced by the animal is sufficient to explain a majority (93%) of the turning decisions. We automatically estimate this scalar value from the observable trajectory, without any assumption regarding the sensory processing. A posteriori, we show that the estimated feature field is consistent with previous results measured in other experimental conditions. The remaining turning decisions, not explained by this feature of the visual input, may be attributed to a combination of deterministic processes based on unobservable internal states and purely stochastic behavior. We cannot distinguish these contributions using external observations alone, but we are able to provide a quantitative bound of their relative importance with respect to stimulus-triggered decisions. Our results suggest that comparatively few saccades in free-flying conditions are a result of an intrinsic spontaneous process, contrary to previous suggestions. We discuss how this technique could be generalized for use in other systems and employed as a tool for classifying effects into sensory, decision, and motor categories when used to analyze data from genetic behavioral screens.",
number = "2",
month = "February",
slides = "http://purl.org/censi/research/2012-sicb-saccades.pdf",
year = "2013",
pdf = "http://www.ploscompbiol.org/article/fetchObject.action?uri=info%3Adoi%2F10.1371%2Fjournal.pcbi.1002891&representation=PDF",
journal = "PLOS Computational Biology"
}
What goes on in a fruit fly's head while it flies?
In this paper we try to identify the dependence of the decision processes
on the external stimulus experienced by the fly. Remarkably, we are able to
say a great deal about internal sensory processing by just observing the
external behavior.
read more...

Andrea Censi, Antonio Franchi, Luca Marchionni, and Giuseppe Oriolo.
Simultaneous calibration of odometry and sensor parameters for mobile robots.
IEEE Transactions on Robotics, 29(2):475–492, April 2013.
pdfdoi supp. material
bibtex
@article{censi13joint,
author = "Censi, Andrea and Franchi, Antonio and Marchionni, Luca and Oriolo, Giuseppe",
doi = "10.1109/TRO.2012.2226380",
title = "Simultaneous calibration of odometry and sensor parameters for mobile robots",
url = "http://purl.org/censi/2012/joint_calibration",
journal = "IEEE Transactions on Robotics",
year = "2013",
number = "2",
month = "April",
volume = "29",
sortyear = "2011",
pdf = "http://purl.org/censi/research/2012-joint_calibration.pdf",
pages = "475--492"
}
Fast, practical, and extremely precise
simultaneous estimation of odometry and sensor configuration
parameters for mobile robots.
read more...
Andrea Censi.
Kalman filtering with intermittent observations: convergence for semi-markov chains and an intrinsic performance measure.
IEEE Transactions on Automatic Control, February 2011.
pdfdoi
bibtex
@article{censi11kf,
author = "Censi, Andrea",
doi = "10.1109/TAC.2010.2097350",
title = "Kalman filtering with intermittent observations: convergence for semi-Markov chains and an intrinsic performance measure",
journal = "IEEE Transactions on Automatic Control",
issn = "0018-9286",
month = "February",
year = "2011",
pdf = "http://purl.org/censi/research/2011-tac-kf-geometry.pdf",
sortyear = "2010"
}
This paper considers the problem of linear filtering over unreliable
channels. Previous research by Sinopoli et al. has shown that there
is a threshold on the observations arrival probability that distinguishes
between a "stable" and an "unstable" behavior. This paper shows that
those conclusions are misleading and only depend on a particular
choice of the loss function. In fact, the probability distribution
of the filter state exists for each nonzero arrival probability.
Dissertation

Andrea Censi.
Bootstrapping Vehicles: a formal approach to unsupervised sensorimotor learning based on invariance.
Technical Report, California Institute of Technology, 2012.
pdf supp. material slides
bibtex
@techreport{censi12phd,
author = "Censi, Andrea",
title = "{Bootstrapping Vehicles}: A Formal Approach to Unsupervised Sensorimotor Learning Based on Invariance",
url = "http://purl.org/censi/2012/phd",
slides = "http://purl.org/censi/research/201206-defense.pdf",
year = "2012",
pdf = "http://purl.org/censi/research/preprints/bootstrapping_vehicles-1.3-a4.pdf",
institution = "California Institute of Technology"
}
Could a "brain in a vat" be able to control an unknown robotic body
to which it is connected, and use it to achieve useful tasks, without
any prior assumptions on the body's sensors and actuators? In this
work, the problem of "bootstrapping" is studied in the context of
the Vehicles universe, which is an idealization of simple mobile
robots, after the work of Braitenberg. The first thread of results
consists in analyzing such simple sensorimotor cascades and proposing
models of varying complexity that can be learned from data. The second
thread regards how to properly formalize the notions of "absence
of assumptions", as a particular form of invariance that the bootstrapping
agent must satisfy, and proposes some invariance-based design techniques.
This is version 1.3 of my dissertation -- after turning it in, I
am still working to integrate the newer material that I had not the
time to add. So any comments/suggestions are welcome!
read more...
Conference papers
Liam Paull, Jacopo Tani, Heejin Ahn, Javier Alonso-Mora, Luca Carlone, Michal Cap, Yu Fan Chen, Changhyun Choi, Jeff Dusek, Daniel Hoehener, Shih-Yuan Liu, Michael Novitzky, Igor Franzoni Okuyama, Jason Pazis, Guy Rosman, Valerio Varricchio, Hsueh-Cheng Wang, Dmitry Yershov, Hang Zhao, Michael Benjamin, Christopher Carr, Maria Zuber, Sertac Karaman, Emilio Frazzoli, Domitilla Del Vecchio, Daniela Rus, Jonathan How, John Leonard, and Andrea Censi.
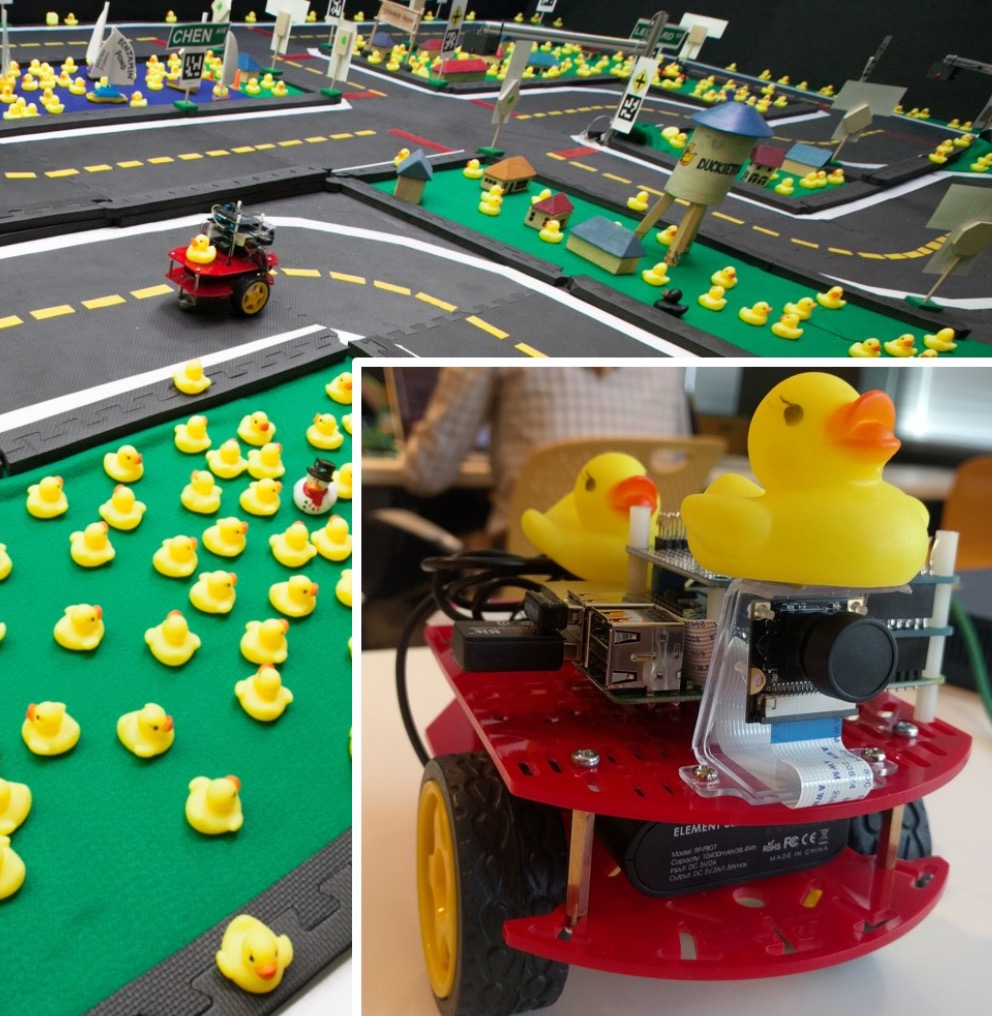
Duckietown: an open and inexpensive and flexible platform for autonomy education and research.
In IEEE International Conference on Robotics and Automation (ICRA). Singapore, May 2017.
pdf supp. material
bibtex
@inproceedings{paull17duckietown,
author = "Paull, Liam and Tani, Jacopo and Ahn, Heejin and Alonso-Mora, Javier and Carlone, Luca and Cap, Michal and Chen, Yu Fan and Choi, Changhyun and Dusek, Jeff and Hoehener, Daniel and Liu, Shih-Yuan and Novitzky, Michael and Okuyama, Igor Franzoni and Pazis, Jason and Rosman, Guy and Varricchio, Valerio and Wang, Hsueh-Cheng and Yershov, Dmitry and Zhao, Hang and Benjamin, Michael and Carr, Christopher and Zuber, Maria and Karaman, Sertac and Frazzoli, Emilio and Vecchio, Domitilla Del and Rus, Daniela and How, Jonathan and Leonard, John and Censi, Andrea",
title = "Duckietown: an Open and Inexpensive and Flexible Platform for Autonomy Education and Research",
url = "http://duckietown.mit.edu/",
booktitle = "IEEE International Conference on Robotics and Automation (ICRA)",
year = "2017",
month = "May",
address = "Singapore",
pdf = "http://people.csail.mit.edu/lpaull/publications/Paull_ICRA_2017.pdf"
}
This paper describes the Duckiebot and its software. With 29 authors, we made the record for a robotics conference.
read more...

Jacopo Tani, Liam Paull, Maria Zuber, Daniela Rus, Jonathan How, John Leonard, and Andrea Censi.
Duckietown: an innovative way to teach autonomy.
In EduRobotics 2016. Athens, Greece, December 2016.
pdf supp. material
bibtex
@inproceedings{tani16duckietown,
author = "Tani, Jacopo and Paull, Liam and Zuber, Maria and Rus, Daniela and How, Jonathan and Leonard, John and Censi, Andrea",
title = "Duckietown: an Innovative Way to Teach Autonomy",
url = "http://duckietown.mit.edu/",
booktitle = "EduRobotics 2016",
year = "2016",
month = "December",
address = "Athens, Greece",
pdf = "http://people.csail.mit.edu/lpaull/publications/Tani_EDU_2016.pdf"
}
This paper describes the course design for Duckietown: learning objectives, teaching methods, etc.
read more...
Andrea Censi.
Monotone co-design problems; or, everything is the same.
In Proceedings of the American Control Conference (ACC). 2016.
Superseded by preprint ``A Mathematical Theory of Co-Design''.
doi
bibtex
@inproceedings{censi15same,
author = "Censi, Andrea",
doi = "10.1109/ACC.2016.7525085",
title = "Monotone Co-Design Problems; or, everything is the same",
booktitle = "Proceedings of the American Control Conference (ACC)",
note = "Superseded by preprint ``A Mathematical Theory of Co-Design''.",
year = "2016",
ignorepdf = "https://purl.org/censi/research/201510-monotone/2-EverythingIsTheSame.pdf",
nourl = "https://co-design.science/"
}
Superseded by preprint ``A Mathematical Theory of Co-Design''.

Prince Singh, Sze Zheng Yong, Jean Gregoire, Andrea Censi, and Emilio Frazzoli.
Stabilization of linear continuous-time systems using neuromorphic vision sensors.
In IEEE Conference on Decision and Control (CDC), 3030–3036. Dec 2016.
doi
bibtex
@inproceedings{singh16stabilization,
author = "Singh, Prince and Yong, Sze Zheng and Gregoire, Jean and Censi, Andrea and Frazzoli, Emilio",
doi = "10.1109/CDC.2016.7798722",
title = "Stabilization of linear continuous-time systems using neuromorphic vision sensors",
booktitle = "IEEE Conference on Decision and Control (CDC)",
month = "Dec",
year = "2016",
keywords = "H∞ control;continuous time systems;linear systems;stability;H∞ controller;LTI system;computer vision algorithms;continuous-time linear time invariant system;linear continuous-time system;neuromorphic vision sensors;quadratic stability;retinal events;robotic applications;stabilization;Cameras;Linear systems;Neuromorphics;Retina;Robot sensing systems;Voltage control",
pages = "3030-3036"
}

E. Mueller, A. Censi, and E. Frazzoli.
Low-latency heading feedback control with neuromorphic vision sensors using efficient approximated incremental inference.
In IEEE Conference on Decision and Control (CDC), 992–999. Dec 2015.
doi
bibtex
@inproceedings{mueller16lowlatency,
author = "Mueller, E. and Censi, A. and Frazzoli, E.",
doi = "10.1109/CDC.2015.7402002",
title = "Low-latency heading feedback control with neuromorphic vision sensors using efficient approximated incremental inference",
booktitle = "IEEE Conference on Decision and Control (CDC)",
month = "Dec",
year = "2015",
keywords = "closed loop systems;feedback;image sensors;mobile robots;trajectory control;asynchronous neuromorphic vision sensors;closed loop performance;incremental inference;low-latency heading feedback control;mobile robotic systems;trajectory tracking problem;Brightness;Cameras;Heuristic algorithms;Neuromorphics;Optical sensors;Vehicle dynamics",
pages = "992-999"
}

E. Mueller, A. Censi, and E. Frazzoli.
Efficient high speed signal estimation with neuromorphic vision sensors.
In International Conference on Event-based Control, Communication, and Signal Processing (EBCCSP), 1–8. June 2015.
doi
bibtex
@inproceedings{mueller16efficient,
author = "Mueller, E. and Censi, A. and Frazzoli, E.",
doi = "10.1109/EBCCSP.2015.7300672",
title = "Efficient high speed signal estimation with neuromorphic vision sensors",
booktitle = "International Conference on Event-based Control, Communication, and Signal Processing (EBCCSP)",
month = "June",
year = "2015",
keywords = "edge detection;feedback;image reconstruction;image sensors;robot vision;asynchronous configuration sensor;dynamical systems;event stream;feedback control;high-speed signal estimation;high-speed signal reconstruction;low-latency high-bandwidth sensing;neuromorphic vision sensors;robotic systems;sensor properties;visual feedback control;Brightness;Neuromorphics;Noise;Robot sensing systems;Sensor systems;Voltage control",
pages = "1-8"
}
Andrea Censi.
Efficient Neuromorphic Optomotor Heading Regulation.
In American Control Conference (ACC). Chicago, IL, July 2015.
doi
bibtex
@inproceedings{censi15neucontrol_sub,
author = "Censi, Andrea",
doi = "10.1109/ACC.2015.7171931",
title = "{Efficient Neuromorphic Optomotor Heading Regulation}",
booktitle = "American Control Conference (ACC)",
year = "2015",
month = "July",
apdf = "https://purl.org/censi/research/2015-neucontrol-sub.pdf",
address = "Chicago, IL",
aurl = "https://purl.org/censi/2015/neucontrol"
}
This paper describes a method for regulating the heading of a vehicle
based on the feedback from a neuromorphic event-based sensor.
Andrea Censi, Erich Mueller, Emilio Frazzoli, and Stefano Soatto.
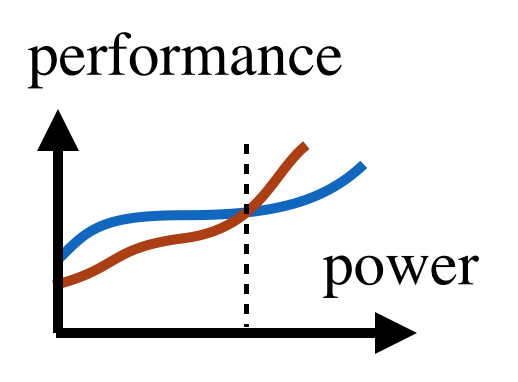
A Power-Performance Approach to Comparing Sensor Families, with application to comparing neuromorphic to traditional vision sensors.
In IEEE International Conference on Robotics and Automation (ICRA). May 2015.
bibtex
@inproceedings{censi15powerperf_sub,
author = "Censi, Andrea and Mueller, Erich and Frazzoli, Emilio and Soatto, Stefano",
title = "{A Power-Performance Approach to Comparing Sensor Families, with application to comparing neuromorphic to traditional vision sensors}",
timestamp = "2014.09.30",
booktitle = "IEEE International Conference on Robotics and Automation (ICRA)",
month = "May",
urlresolved = "https://purl.org/censi/web/powerperf",
aurl = "https://purl.org/censi/2015/powerperf",
apdf = "https://purl.org/censi/research/2015-powerperf-sub.pdf",
year = "2015",
owner = "andrea"
}
How to compare two sensors, or generally, two sensor families? Any meaningful comparison depends on the task.
This paper shows that it also depends on the sensing power available.
Luca Carlone, Andrea Censi, and Frank Dellaert.
Coherent measurements selection via l1 relaxation: an approach to robust estimation over graphs.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). October 2014.
bibtex
@inproceedings{carlone14coherent_sub,
author = "Carlone, Luca and Censi, Andrea and Dellaert, Frank",
title = "Coherent Measurements Selection via l1 Relaxation: an Approach to Robust Estimation over Graphs",
abstract = "",
month = "October",
year = "2014",
booktitle = "IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)"
}
Luca, Frank
and I show how outliers in planar pose graph optimization
can be detected using convex relaxation. This builds on previous papers showing
that planar pose graph optimization can be decoupled in linear problems (with a few tricks).

Andrea Censi and Davide Scaramuzza.
Low-latency event-based visual odometry.
In IEEE International Conference on Robotics and Automation (ICRA). May 2014.
pdf supp. material slides
bibtex
@inproceedings{censi13dvsd_sub,
author = "Censi, Andrea and Scaramuzza, Davide",
title = "Low-latency Event-Based Visual Odometry",
url = "https://purl.org/censi/2013/dvsd",
booktitle = "IEEE International Conference on Robotics and Automation (ICRA)",
month = "May",
slides = "https://purl.org/censi/research/2013-dvsd/201405-icra15-dvsd.pdf",
year = "2014",
pdf = "https://purl.org/censi/research/2013-dvsd-final.pdf",
abstract = ""
}
This paper describes an event-based visual odometry algorighm which
uses a DVS sensor together with a normal camera.
read more...
Andrea Censi, Jonas Strubel, Christian Brandli, Tobi Delbruck, and Davide Scaramuzza.
Low-latency localization by active led markers tracking using a dynamic vision sensor.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 891–898. Tokyo,Japan, November 2013.
pdfdoi supp. material slides
bibtex
@inproceedings{censi13dvs,
author = "Censi, Andrea and Strubel, Jonas and Brandli, Christian and Delbruck, Tobi and Scaramuzza, Davide",
doi = "10.1109/IROS.2013.6696456",
title = "Low-latency localization by Active LED Markers tracking using a Dynamic Vision Sensor",
url = "http://purl.org/censi/2013/dvs",
booktitle = "IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)",
year = "2013",
month = "November",
slides = "http://purl.org/censi/research/2013-dvs-slides.pdf",
pages = "891--898",
address = "Tokyo,Japan",
pdf = "http://purl.org/censi/research/2013-dvs-sub.pdf",
abstract = "At the current state of the art, the agility of an autonomous flying robot is limited by the speed of its sensing pipeline, as the relatively high latency and low sampling frequency limit the aggressiveness of the control strategies that can be implemented. To obtain more agile robots, we need faster sensors. A Dynamic Vision Sensor (DVS) encodes changes in the perceived brightness using an address-event representation. The latency of such sensors can be measured in the microseconds, thus offering the theoretical possibility of creating a sensing pipeline whose latency is negligible compared to the dynamics of the platform. However, to use these sensors we must rethink the way we interpret visual data. We present an approach to low-latency pose tracking using a DVS and Active Led Markers (ALMs), which are LEDs blinking at high frequency (>1 KHz). The DVS time resolution is able to distinguish different frequencies, thus avoiding the need for data association. We compare the DVS approach to traditional tracking using a CMOS camera, and we show that the DVS performance is not affected by fast motion, unlike the CMOS camera, which suffers from motion blur."
}

Adam Nilsson and Andrea Censi.
Accurate recursive learning of uncertain diffeomorphism dynamics.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Tokyo, Japan, November 2013.
pdfdoi supp. material
bibtex
@inproceedings{nilsson13rddl,
author = "Nilsson, Adam and Censi, Andrea",
doi = "10.1109/IROS.2013.6696504",
title = "Accurate recursive learning of uncertain diffeomorphism dynamics",
url = "http://purl.org/censi/2013/rddl",
booktitle = "IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)",
year = "2013",
month = "November",
address = "Tokyo, Japan",
pdf = "http://purl.org/censi/research/2013-diff-rlearn-sub.pdf",
abstract = "Diffeomorphisms dynamical systems are dynamical systems where the state is an image and each commands induce a diffeomorphism of the state. These systems can approximate the dynamics of robotic sensorimotor cascades well enough to be used for problems such as planning in observations space. Learning of an arbitrary diffeomorphism from pairs of images is a high dimensional learning problem. This paper describes two improvements to the methods presented in previous work. The previous method had required O(ρ⁴) memory as a function of the desired resolution ρ, which, in practice, was the main limitation to the resolution of the diffeomorphisms that could be learned. This paper describes an algorithm based on recursive refinement that lowers the memory requirement to O(ρ²) memory and O(ρ² log(ρ)) computation. Another improvement regards the estimation the diffeomorphism uncertainty, which is used to represent the sensor's limited field of view; the improved method obtains a more accurate estimation of the uncertainty by checking the consistency of a learned diffeomorphism and its independently learned inverse. The methods are tested on two robotic systems (a pan-tilt camera and a 5-DOF manipulator)."
}

Andrea Censi, Adam Nilsson, and Richard M. Murray.
Motion planning in observations space with learned diffeomorphism models.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2860–2867. Karlsruhe, Germany, 5 2013.
pdfdoi supp. material
bibtex
@inproceedings{censi13motion,
author = "Censi, Andrea and Nilsson, Adam and Murray, Richard M.",
doi = "10.1109/ICRA.2013.6630973",
title = "Motion planning in observations space with learned diffeomorphism models.",
url = "http://purl.org/censi/2012/dptr1",
booktitle = "Proceedings of the {IEEE} International Conference on Robotics and Automation ({ICRA})",
year = "2013",
month = "5",
pages = "2860--2867",
address = "Karlsruhe, Germany",
pdf = "http://purl.org/censi/research/2012-dptr1.pdf",
abstract = "We consider the problem of planning motions in observations space, based on learned models of the dynamics that associate to each action a diffeomorphism of the obser- vations domain. For an arbitrary set of diffeomorphisms, this problem must be formulated as a generic search problem. We adapt established algorithms of the graph search family. In this scenario, node expansion is very costly, as each node in the graph is associated to an uncertain diffeomorphism and corresponding predicted observations. We describe several improvements that ameliorate performance: the introduction of better image similarities to use as heuristics; a method to reduce the number of expanded nodes by preliminarily identifying redundant plans; and a method to pre-compute composite actions that make the search efficient in all directions."
}
Using learned diffeomorphism models of the dynamics of cameras and range-finders,
we formulate motion planning as a planning problem in the observations space.
Nodes/states are (uncertain) images; actions/edges are (uncertain) diffeomorphisms.
read more...
Paloma Puente and Andrea Censi.
Dense map inference with user-defined priors: from priorlets to scan eigenvariations.
In Cyrill Stachniss, Kerstin Schill, and David Uttal, editors, Spatial Cognition VIII, volume 7463 of Lecture Notes in Computer Science, 94–113. Springer Berlin Heidelberg, August 2012.
pdfdoi slides
bibtex
@inproceedings{delapuente12dense,
editor = "Stachniss, Cyrill and Schill, Kerstin and Uttal, David",
author = "Puente, Paloma and Censi, Andrea",
volume = "7463",
publisher = "Springer Berlin Heidelberg",
doi = "10.1007/978-3-642-32732-2_6",
isbn = "978-3-642-32731-5",
title = "Dense Map Inference with User-Defined Priors: From Priorlets to Scan Eigenvariations",
series = "Lecture Notes in Computer Science",
booktitle = "Spatial Cognition VIII",
month = "August",
slides = "http://purl.org/censi/research/2012-structprior-slides.pdf",
year = "2012",
pdf = "http://authors.library.caltech.edu/28143/1/report.pdf",
pages = "94-113"
}
Paloma and I
study how to integrate in the mapping problem
"rich" information about the environment structure. We use the concept
of priorlets to capture a variety of environment priors. We recover
the map by optimizing at the same time for continuous and discrete
variables (measurements and topology, respectively).
Andrea Censi and Richard M. Murray.
Learning diffeomorphism models of robotic sensorimotor cascades.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Saint Paul, MN, May 2012.
pdfdoi supp. material slides
bibtex
@inproceedings{censi12diffeo,
author = "Censi, Andrea and Murray, Richard M.",
doi = "10.1109/ICRA.2012.6225318",
title = "Learning diffeomorphism models of robotic sensorimotor cascades",
url = "http://purl.org/censi/2011/diffeo",
timestamp = "2011.09.13",
booktitle = "Proceedings of the {IEEE} International Conference on Robotics and Automation ({ICRA})",
year = "2012",
month = "May",
slides = "http://purl.org/censi/research/2012-diffeo-slides.pdf",
address = "Saint Paul, MN",
pdf = "http://purl.org/censi/research/2012-diffeo.pdf"
}
We show that diffeomorphisms can represent the dynamics of both range-finders
as well as cameras, and can be easily learned from raw sensorimotor
data. A follow-up paper shows how to do planning in observations
space with these learned diffeomorphisms.
read more...
(best student
paper finalist)

Andrea Censi, Magnus Hakansson, and Richard M. Murray.
Fault detection and isolation from uninterpreted data in robotic sensorimotor cascades.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Saint Paul, MN, May 2012.
pdfdoi supp. material slides
bibtex
@inproceedings{censi12fault,
author = "Censi, Andrea and Hakansson, Magnus and Murray, Richard M.",
doi = "10.1109/ICRA.2012.6225311",
title = "Fault detection and isolation from uninterpreted data in robotic sensorimotor cascades",
url = "http://purl.org/censi/2011/fault",
timestamp = "2011.09.16",
booktitle = "Proceedings of the {IEEE} International Conference on Robotics and Automation ({ICRA})",
year = "2012",
month = "May",
slides = "http://purl.org/censi/research/2012-fault-slides.pdf",
address = "Saint Paul, MN",
pdf = "http://purl.org/censi/research/2012-fault.pdf"
}
This paper shows how bootstrapped low-level sensorimotor models,
such as BDS and BGDS can be used for faults and anomaly
detection in sensorimotor cascades. The concept of usefulness allows
to do detection without having a model for the healthy system.
read more...
Andrea Censi and Richard M. Murray.
Uncertain semantics, representation nuisances, and necessary invariance properties of bootstrapping agents.
In Joint IEEE International Conference on Development and Learning and Epigenetic Robotics. Frankfurt, Germany, August 2011.
pdfdoi slides
bibtex
@inproceedings{censi11semantics,
author = "Censi, Andrea and Murray, Richard M.",
doi = "10.1109/DEVLRN.2011.6037313",
title = "Uncertain semantics, representation nuisances, and necessary invariance properties of bootstrapping agents",
booktitle = "Joint IEEE International Conference on Development and Learning and Epigenetic Robotics",
year = "2011",
month = "August",
slides = "http://purl.org/censi/research/2011-icdl-invariance-poster.pdf",
address = "Frankfurt, Germany",
pdf = "http://purl.org/censi/research/2011-icdl-invariance.pdf"
}
This paper tries to describe formally the idea of "uncertain semantics"
in a bootstrapping problem by using the mathematics of group actions.
If interested, please see Part 1 and Part 3 of my dissertation,
where these ideas are further expanded and made much more formal
than in this short paper.

Davide Scaramuzza, Andrea Censi, and Kostas Daniilidis.
Exploiting motion priors in visual odometry for vehicle-mounted cameras with non-holonomic constraints.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). San Francisco, CA, September 2011.
pdfdoi
bibtex
@inproceedings{scaramuzza11visodo,
author = "Scaramuzza, Davide and Censi, Andrea and Daniilidis, Kostas",
doi = "10.1109/IROS.2011.6095123",
title = "Exploiting motion priors in visual odometry for vehicle-mounted cameras with non-holonomic constraints",
booktitle = "{IEEE/RSJ} International Conference on Intelligent Robots and Systems (IROS)",
year = "2011",
month = "September",
address = "San Francisco, CA",
pdf = "http://purl.org/censi/research/2011-iros-scaRansac.pdf"
}
Fast and precise visual odometry by exploiting the motion priors
specific to the dynamics of a car.
Andrea Censi and Richard M. Murray.
Bootstrapping sensorimotor cascades: a group-theoretic perspective.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). San Francisco, CA, September 2011.
pdfdoi supp. material
bibtex
@inproceedings{censi11bgds,
author = "Censi, Andrea and Murray, Richard M.",
doi = "10.1109/IROS.2011.6095151",
title = "Bootstrapping sensorimotor cascades: a group-theoretic perspective",
url = "http://purl.org/censi/2011/bgds",
booktitle = "{IEEE/RSJ} International Conference on Intelligent Robots and Systems (IROS)",
year = "2011",
month = "September",
address = "San Francisco, CA",
pdf = "http://purl.org/censi/research/2011-iros-bgds.pdf"
}
This paper discusses a class of models (BGDS) that capture the bilinear
dynamics of heterogeneous sensors, such as field samplers, cameras,
and range-finders, as well as their dependence on the gradient of
the observations.
This material has been greatly expanded in my dissertation
(Part 2).
read more...
(best conference
paper finalist)
Andrea Censi and Richard M. Murray.
Bootstrapping bilinear models of robotic sensorimotor cascades.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Shanghai, China, May 2011.
supp. material slides
bibtex
@inproceedings{censi11bds,
author = "Censi, Andrea and Murray, Richard M.",
oldpdf = "http://purl.org/censi/research/2010-bootstrapping-bilinear-short.pdf",
title = "Bootstrapping bilinear models of robotic sensorimotor cascades",
url = "http://purl.org/censi/2010/boot",
booktitle = "Proceedings of the {IEEE} International Conference on Robotics and Automation ({ICRA})",
year = "2011",
month = "May",
slides = "http://purl.org/censi/research/2011-icra-bds-slides.pdf",
address = "Shanghai, China",
olddoi = "10.1109/ICRA.2011.5979844"
}
This paper shows that simple bilinear models capture the dynamics
of heterogeneous sensors, such as field samplers, cameras, and range-finders.
These models can be learned unsupervisedly and used to perform simple
tasks.
This material has been greatly expanded in the following paper.
read more...

Shuo Han, Andrea Censi, Andrew D. Straw, and Richard M. Murray.
A bio-plausible design for visual pose stabilization.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 5679–5686. Taipei, Taiwan, October 2010.
pdfdoi video slides
bibtex
@inproceedings{han10pose,
author = "Han, Shuo and Censi, Andrea and Straw, Andrew D. and Murray, Richard M.",
doi = "10.1109/IROS.2010.5652857",
title = "A bio-plausible design for visual pose stabilization",
booktitle = "{IEEE/RSJ} International Conference on Intelligent Robots and Systems (IROS)",
year = "2010",
month = "October",
slides = "http://purl.org/censi/research/2009-cdc-bio-attitude-slides.pdf",
video = "http://purl.org/hanshuo/2010/pd_pose_stabilization",
pages = "5679--5686",
address = "Taipei, Taiwan",
pdf = "http://purl.org/censi/research/2010-iros-bioplausible_pose.pdf",
abstract = "We consider the problem of purely visual pose stabilization (also known as servoing) of a second-order rigid-body system with six degrees of freedom: how to choose forces and torques, based on the current view and a memorized goal image, to steer the pose towards a desired one. Emphasis has been given to the bio-plausibility of the computation, in the sense that the control laws could be in principle implemented on the neural substrate of simple insects. We show that stabilizing laws can be realized by bilinear/quadratic operations on the visual input. This particular computational structure has several numerically favorable characteristics (sparse, local, and parallel), and thus permits an efficient engineering implementation. We show results of the control law tested on an indoor helicopter platform."
}
Stabilizing hovering for an helicopter using a bio-plausible strategy.

Andrea Censi, Shuo Han, Sawyer B. Fuller, and Richard M. Murray.
A bio-plausible design for visual attitude stabilization.
In Proceedings of the 48th IEEE Conference on Decision and Control. Shanghai, China, December 2009.
pdfdoi slides
bibtex
@inproceedings{censi09attitude,
author = "Censi, Andrea and Han, Shuo and Fuller, Sawyer B. and Murray, Richard M.",
doi = "10.1109/CDC.2009.5400408",
title = "A bio-plausible design for visual attitude stabilization",
booktitle = "Proceedings of the 48th IEEE Conference on Decision and Control",
year = "2009",
month = "December",
slides = "http://purl.org/censi/research/2009-cdc-bio-attitude-slides.pdf",
address = "Shanghai, China",
pdf = "http://purl.org/censi/research/2009-cdc-bio-attitude.pdf"
}
This paper describes a "bio-plausible" control strategy for stabilizing
the attitude in SO(3) of a flying body. The follow-up paper
considers the SE(3) case.

Andrea Censi.
On the performance of Kalman filtering with intermittent observations: a geometric approach with fractals.
In Proceedings of the American Control Conference (ACC). St. Louis, Missouri, June 2009.
pdfdoi supp. material slides
bibtex
@inproceedings{censi09fractals,
author = "Censi, Andrea",
doi = "10.1109/ACC.2009.5159869",
title = "On the performance of {K}alman filtering with intermittent observations: a geometric approach with fractals",
url = "http://purl.org/censi/2008/fractals",
booktitle = "Proceedings of the American Control Conference (ACC)",
year = "2009",
month = "June",
slides = "http://purl.org/censi/research/2009-acc-fractals-slides.pdf",
address = "St. Louis, Missouri",
pdf = "http://purl.org/censi/research/2009-acc-fractals.pdf",
abstract = "This paper describes the stationary distribution of the a-posteriori covariance matrix of a Kalman filter when the availability of measurements is subject to random phenomena such as lossy network links. If a certain non-overlapping condition is satisfied, the cdf has a fractal nature, and there exists a closed-form expression for it. If the condition is not satisfied, deciding whether the cdf is singular or not, even in the scalar case, is at least as hard as some open problems in measure and number theory."
}

Andrea Censi.
On achievable accuracy for pose tracking.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Kobe, Japan, May 2009.
pdfdoi supp. material slides
bibtex
@inproceedings{censi09posetracking,
author = "Censi, Andrea",
doi = "10.1109/ROBOT.2009.5152236",
title = "On achievable accuracy for pose tracking",
url = "http://purl.org/censi/2008/posetracking",
booktitle = "Proceedings of the {IEEE} International Conference on Robotics and Automation ({ICRA})",
year = "2009",
month = "May",
slides = "http://purl.org/censi/research/2009-icra-posetracking-slides.pdf",
address = "Kobe, Japan",
pdf = "http://purl.org/censi/research/2009-icra-posetracking.pdf",
abstract = "This paper presents Cramer-Rao bound-like inequalities for pose tracking, which is defined as the problem of recovering the robot displacement given two successive readings of a relative sensor. Computing the exact Fisher Information Matrix (FIM) for pose tracking is hard, because the state comprises the map, which is infinite-dimensional and unknown. This paper shows that the FIM for pose tracking can be bounded by a function of the FIM for localization on a known map, thereby reducing the analysis to a finite-dimensional problem. The resulting bounds are independent of the map prior and representation. The results are valid for any relative sensor; the experimental verification is done for the particular case of pose tracking using range-finders (scan matching)."
}
In principle, how precise can a scan-matching method be? This paper
gives a very simple relation between the achievable accuracy for
localization (when the map is known) and the accuracy for scan-matching
(when the map is not known).
read more...
Stefano Carpin and Andrea Censi.
An experimental assessment of the hsm3d algorithm for sparse and colored data.
In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 3595–3600. St. Louis, MO, October 2009.
doi
bibtex
@inproceedings{carpin09hsm3d,
author = "Carpin, Stefano and Censi, Andrea",
doi = "10.1109/IROS.2009.5354618",
title = "An experimental assessment of the HSM3D algorithm for sparse and colored data",
booktitle = "Proceedings of the {IEEE/RSJ} International Conference on Intelligent Robots and Systems (IROS)",
year = "2009",
month = "October",
address = "St. Louis, MO",
pages = "3595-3600"
}

Andrea Censi and Stefano Carpin.
HSM3D: feature-less global 6DOF scan-matching in the Hough/Radon domain.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Kobe, Japan, May 2009.
pdfdoi supp. material slides
bibtex
@inproceedings{censi09hsm3d,
author = "Censi, Andrea and Carpin, Stefano",
doi = "10.1109/ROBOT.2009.5152431",
title = "{HSM3D}: Feature-Less Global {6DOF} Scan-Matching in the {H}ough/{R}adon Domain",
url = "http://purl.org/censi/2008/hsm3d",
booktitle = "Proceedings of the {IEEE} International Conference on Robotics and Automation ({ICRA})",
year = "2009",
month = "May",
slides = "http://purl.org/censi/research/2009-icra-hsm3d-slides.pdf",
address = "Kobe, Japan",
pdf = "http://purl.org/censi/research/2009-icra-hsm3d.pdf",
abstract = "This paper presents HSM3D, an algorithm for global rigid6DOF alignment of 3D point clouds. The algorithm works byprojecting the two input sets into the Radon/Hough domain,whose properties allow to decompose the 6DOF search into aseries of fast one-dimensional cross-correlations. Noplanes or other particular features must be present in theinput data, and the algorithm is provably complete in thecase of noise-free input. The algorithm has beenexperimentally validated on publicly available data sets."
}

Andrea Censi and Richard M. Murray.
Real-valued consensus over noisy quantized channels.
In Proceedings of the American Control Conference (ACC). St. Louis, Missouri, June 2009.
pdfdoi supp. material slides
bibtex
@inproceedings{censi09consensus,
author = "Censi, Andrea and Murray, Richard M.",
doi = "10.1109/ACC.2009.5159872",
title = "Real-valued consensus over noisy quantized channels",
url = "http://purl.org/censi/2008/consensus",
booktitle = "Proceedings of the American Control Conference (ACC)",
year = "2009",
month = "June",
slides = "http://purl.org/censi/research/2009-acc-consensus-slides.pdf",
address = "St. Louis, Missouri",
pdf = "http://purl.org/censi/research/2009-acc-consensus.pdf",
abstract = "This paper concerns the average consensus problem with theconstraint of quantized communication between nodes. Abroad class of algorithms is analyzed, in which thetransmission strategy, which decides what value tocommunicate to the neighbors, can include various kinds ofrounding, probabilistic quantization, and bounded noise.The arbitrariness of the transmission strategy iscompensated by a feedback mechanism which can beinterpreted as a self-inhibitory action. The result is thatthe average of the nodes state is not conserved acrossiterations, and the nodes do not converge to a consensus;however, we show that both errors can be made as small asdesired. Bounds on these quantities involve the spectralproperties of the graph and can be proved by employingelementary techniques of LTI systems analysis."
}
How to reach a consensus if you and your friends are a bunch of spiking
neurons.
read more...
Daniele Calisi, Andrea Censi, Luca Iocchi, and Daniele Nardi.
OpenRDK: a modular framework for robotic software development.
In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Nice, France, September 2008.
pdfdoi supp. material slides
bibtex
@inproceedings{calisi08openrdk,
author = "Calisi, Daniele and Censi, Andrea and Iocchi, Luca and Nardi, Daniele",
doi = "10.1109/IROS.2008.4651213",
title = "{OpenRDK}: A Modular Framework for Robotic Software Development",
url = "http://openrdk.sourceforge.net",
booktitle = "Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)",
year = "2008",
month = "September",
slides = "http://purl.org/censi/research/2008-iros-openrdk-slides.pdf",
address = "Nice, France",
pdf = "http://purl.org/censi/research/2008-iros-openrdk.pdf",
abstract = "In this paper we conduct an analysis of existingframeworks for robot software development and wepresent OpenRDK, a modular framework focused onrapid development of distributed robotic systems.It has been designed following users' advice and has been in use within our group for severalyears. By now OpenRDK has been successfullyapplied in diverse applications with heterogeneousrobots and as we believe it is fruitfully usableby others we are releasing it as open source.."
}

Andrea Censi, Daniele Calisi, Alessandro De Luca, and Giuseppe Oriolo.
A Bayesian framework for optimal motion planning with uncertainty.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Pasadena, CA, May 2008.
pdfdoi supp. material slides
bibtex
@inproceedings{censi08ppu,
author = "Censi, Andrea and Calisi, Daniele and Luca, Alessandro De and Oriolo, Giuseppe",
doi = "10.1109/ROBOT.2008.4543469",
title = "A {B}ayesian framework for optimal motion planning with uncertainty",
url = "http://purl.org/censi/2007/ppu",
booktitle = "Proceedings of the {IEEE} International Conference on Robotics and Automation ({ICRA})",
year = "2008",
month = "May",
slides = "http://purl.org/censi/research/2008-icra-ppu-slides.pdf",
address = "Pasadena, CA",
pdf = "http://purl.org/censi/research/2008-icra-ppu.pdf",
abstract = "Modeling robot motion planning with uncertainty in a Bayesian framework leads to a computationally intractable stochastic control problem. We seek hypotheses that can justify a separate implementation of control, localization and planning. In the end, we reduce the stochastic control problem to path-planning in the extended space of poses x covariances; the transitions between states are modeled through the use of the Fisher information matrix. In this framework, we consider two problems: minimizing the execution time, and minimizing the final covariance, with an upper bound on the execution time. Two correct and complete algorithms are presented. The first is the direct extension of classical graph-search algorithms in the extended space. The second one is a back-projection algorithm: uncertainty constraints are propagated backward from the goal towards the start state."
}
How to get to your goal without getting lost. This was my Master's
degree final thesis.
read more...

Andrea Censi.
An ICP variant using a point-to-line metric.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Pasadena, CA, May 2008.
pdfdoi supp. material slides
bibtex
@inproceedings{censi08plicp,
author = "Censi, Andrea",
doi = "10.1109/ROBOT.2008.4543181",
title = "An {ICP} variant using a point-to-line metric",
url = "http://purl.org/censi/2007/plicp",
booktitle = "Proceedings of the {IEEE} International Conference on Robotics and Automation ({ICRA})",
year = "2008",
month = "May",
slides = "http://purl.org/censi/research/2008-icra-plicp-slides.pdf",
address = "Pasadena, CA",
pdf = "http://purl.org/censi/research/2008-icra-plicp.pdf",
abstract = "This paper describes PLICP, an ICP (Iterative Closest/Corresponding Point) variant that uses a point-to-line metric, and an exact closed-form for minimizing such metric. The resulting algorithm has some interesting properties: it converges quadratically, and in a finite number of steps. The method is validated against vanilla ICP, IDC (Iterative Dual Correspondences), and MbICP (Metric-Based ICP) by reproducing the experiments performed in Minguez et al. (2006). The experiments suggest that PLICP is more precise, and requires less iterations. However, it is less robust to very large initial displacement errors. The last part of the paper is devoted to purely algorithmic optimization of the correspondence search; this allows for significant speed-up of the computation. The source code is available for download."
}

Andrea Censi and Gian Diego Tipaldi.
Lazy localization using the Frozen-Time Smoother.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Pasadena, CA, May 2008.
pdfdoi supp. material
bibtex
@inproceedings{censi08fts,
author = "Censi, Andrea and Tipaldi, Gian Diego",
doi = "10.1109/ROBOT.2008.4543631",
title = "Lazy Localization using the {F}rozen-{T}ime {S}moother",
url = "http://purl.org/censi/2007/fts",
booktitle = "Proceedings of the {IEEE} International Conference on Robotics and Automation ({ICRA})",
year = "2008",
month = "May",
address = "Pasadena, CA",
pdf = "http://purl.org/censi/research/2008-icra-fts.pdf",
abstract = "We present a new algorithm for solving the global localization problem called Frozen-Time Smoother (FTS). Time is `frozen', in the sense that the belief always refers to the same time instant, instead of following a moving target, like Monte Carlo Localization does. This algorithm works in the case in which global localization is formulated as a smoothing problem, and a precise estimate of the incremental motion of the robot is usually available. These assumptions correspond to the case when global localization is used to solve the loop closing problem in SLAM. We compare FTS to two Monte Carlo methods designed with the same assumptions. The experiments suggest that a naive implementation of the FTS is more efficient than an extremely optimized equivalent Monte Carlo solution. Moreover, the FTS has an intrinsic laziness: it does not need frequent updates (scans can be integrated once every many meters) and it can process data in arbitrary order. The source code and datasets are available for download."
}
Global localization without the worries and anxiety of filtering.
read more...
Andrea Censi, Luca Marchionni, and Giuseppe Oriolo.
Simultaneous maximum-likelihood calibration of robot and sensor parameters.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Pasadena, CA, May 2008.
pdfdoi video supp. material slides
bibtex
@inproceedings{censi08calib,
author = "Censi, Andrea and Marchionni, Luca and Oriolo, Giuseppe",
doi = "10.1109/ROBOT.2008.4543516",
title = "Simultaneous maximum-likelihood calibration of robot and sensor parameters",
url = "http://purl.org/censi/2007/calib",
booktitle = "Proceedings of the {IEEE} International Conference on Robotics and Automation ({ICRA})",
year = "2008",
month = "May",
slides = "http://purl.org/censi/research/2008-icra-calibration-slides.pdf",
video = "http://purl.org/censi/research/2008-icra-calibration-video.mpg",
address = "Pasadena, CA",
pdf = "http://purl.org/censi/research/2008-icra-calibration.pdf",
abstract = "For a differential-drive mobile robot equipped with an on-board range sensor, there are six parameters to calibrate: three for the odometry (radii and distance between the wheels), and three for the pose of the sensor with respect to the robot frame. This paper describes a method for calibrating all six parameters at the same time, without the need for external sensors or devices. Moreover, it is not necessary to drive the robot along particular trajectories. The available data are the measures of the angular velocities of the wheels and the range sensor readings. The maximum-likelihood calibration solution is found in a closed form."
}

Andrea Censi.
An accurate closed-form estimate of ICP's covariance.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 3167–3172. Rome, Italy, April 2007.
pdfdoi supp. material slides
bibtex
@inproceedings{censi07accurate,
author = "Censi, Andrea",
doi = "10.1109/ROBOT.2007.363961",
title = "An accurate closed-form estimate of {ICP}'s covariance",
url = "http://purl.org/censi/2006/icpcov",
year = "2007",
booktitle = "Proceedings of the {IEEE} International Conference on Robotics and Automation ({ICRA})",
issn = "1050-4729",
month = "April",
slides = "http://purl.org/censi/research/2007-icra-icpcov-slides.pdf",
pages = "3167--3172",
address = "Rome, Italy",
pdf = "http://purl.org/censi/research/2007-icra-icpcov.pdf",
abstract = "Existing methods for estimating the covariance of the ICP (Iterative Closest/Corresponding Point) algorithm are either inaccurate or are computationally too expensive to be used online. This paper proposes a new method, based on the analysis of the error function being minimized. It considers that the correspondences are not independent (the same measurement being used in more than one correspondence), and explicitly utilizes the covariance matrix of the measurements, which are not assumed to be independent either. The validity of the approach is verified through extensive simulations: it is more accurate than previous methods and its computational load is negligible. The ill-posedness of the surface matching problem is explicitly tackled for under-constrained situations by performing an observability analysis; in the analyzed cases the method still provides a good estimate of the error projected on the observable manifold."
}
This paper describes a proper way to compute the covariance of
an ICP estimate, which is shown to be superior to the existing algernatives.
read more...

Andrea Censi.
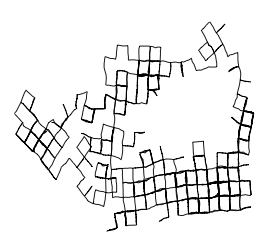
On achievable accuracy for range-finder localization.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 4170–4175. Rome, Italy, April 2007.
pdfdoi supp. material slides
bibtex
@inproceedings{censi07achievable,
author = "Censi, Andrea",
doi = "10.1109/ROBOT.2007.364120",
title = "On achievable accuracy for range-finder localization",
url = "http://purl.org/censi/2006/accuracy",
year = "2007",
booktitle = "Proceedings of the {IEEE} International Conference on Robotics and Automation ({ICRA})",
issn = "1050-4729",
month = "April",
slides = "http://purl.org/censi/research/2007-icra-accuracy-slides.pdf",
pages = "4170--4175",
address = "Rome, Italy",
pdf = "http://purl.org/censi/research/2007-icra-accuracy.pdf",
abstract = "The covariance of every unbiased estimator is bounded by the Cramer-Rao lower bound, which is the inverse of Fisher's information matrix. This paper shows that, for the case of localization with range-finders, Fisher's matrix is a function of the expected readings and of the orientation of the environment's surfaces at the sensed points. The matrix also offers a mathematically sound way to characterize under- constrained situations as those for which it is singular: in those cases the kernel describes the direction of maximum uncertainty. This paper also introduces a simple model of unstructured environments for which the Cramer-Rao bound is a function of two statistics of the shape of the environment: the average radius and a measure of the irregularity of the surfaces. Although this model is not valid for all environments, it allows for some interesting qualitative considerations. As an experimental validation, this paper reports simulations comparing the bound with the actual performance of the ICP (Iterative Closest/Corresponding Point) algorithm. Finally, it is discussed the difficulty in extending these results to find a lower bound for accuracy in scan matching and SLAM."
}
How precise can a localization method be? This paper derives the
Cramer-Rao lower bound for localization with range finders.
read more...

Andrea Censi.
Scan matching in a probabilistic framework.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2291–2296. Orlando, Florida, May 2006.
pdfdoi supp. material slides
bibtex
@inproceedings{censi06scan,
author = "Censi, Andrea",
doi = "10.1109/ROBOT.2006.1642044",
title = "Scan matching in a probabilistic framework",
url = "http://purl.org/censi/2006/gpm",
booktitle = "Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)",
year = "2006",
month = "May",
slides = "http://purl.org/censi/research/2006-icra-gpm-slides.pdf",
address = "Orlando, Florida",
pdf = "http://purl.org/censi/research/2006-icra-gpm.pdf",
pages = "2291--2296"
}

Andrea Censi, Luca Iocchi, and Giorgio Grisetti.
Scan matching in the Hough domain.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2739–2744. Barcelona, Spain, 2005.
pdfdoi supp. material slides
bibtex
@inproceedings{censi05hough,
author = "Censi, Andrea and Iocchi, Luca and Grisetti, Giorgio",
doi = "10.1109/ROBOT.2005.1570528",
title = "Scan matching in the {H}ough domain",
url = "http://purl.org/censi/2006/hsm",
booktitle = "Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)",
year = "2005",
slides = "http://purl.org/censi/research/2005-icra-hsm-slides.ppt",
address = "Barcelona, Spain",
pdf = "http://purl.org/censi/research/2005-icra-hsm.pdf",
pages = "2739--2744"
}
A global, complete algorithm for scan matching based on the Hough/Radon
transform. This was my Bachelor's thesis.
read more...
Unrefereed papers
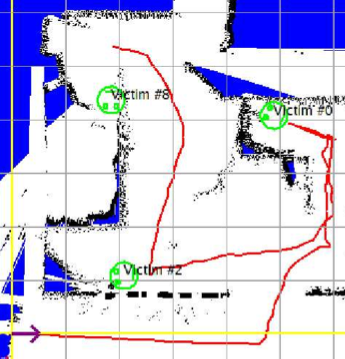
S. Bahadori, D. Calisi, A. Censi, A. Farinelli, G. Grisetti, L. Iocchi, and D. Nardi.
Intelligent systems for search and rescue.
In Proc. of IROS Workshop ``Urban Search and Rescue: from RoboCup to real world applications'' (IROS), Sendai, Japan. 2004.
pdf
bibtex
@inproceedings{BaCa04,
author = "Bahadori, S. and Calisi, D. and Censi, A. and Farinelli, A. and Grisetti, G. and Iocchi, L. and Nardi, D.",
kind = "unref",
title = "Intelligent Systems for Search and Rescue",
booktitle = "Proc. of IROS Workshop ``Urban Search and Rescue: from RoboCup to real world applications'' (IROS), Sendai, Japan",
year = "2004",
pdf = "http://purl.org/censi/research/2004-iros-rescue.pdf"
}
In my first lab, we used to do rescue robotics. Those were the days
when I was in charge of charging the robot batteries...