Recent papers
Luca Carlone, Andrea Censi, and Frank Dellaert.
Coherent measurements selection via l1 relaxation: an approach to robust estimation over graphs.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). October 2014.
bibtex
@inproceedings{carlone14coherent_sub,
author = "Carlone, Luca and Censi, Andrea and Dellaert, Frank",
title = "Coherent Measurements Selection via l1 Relaxation: an Approach to Robust Estimation over Graphs",
abstract = "",
month = "October",
year = "2014",
booktitle = "IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)"
}
Luca, Frank
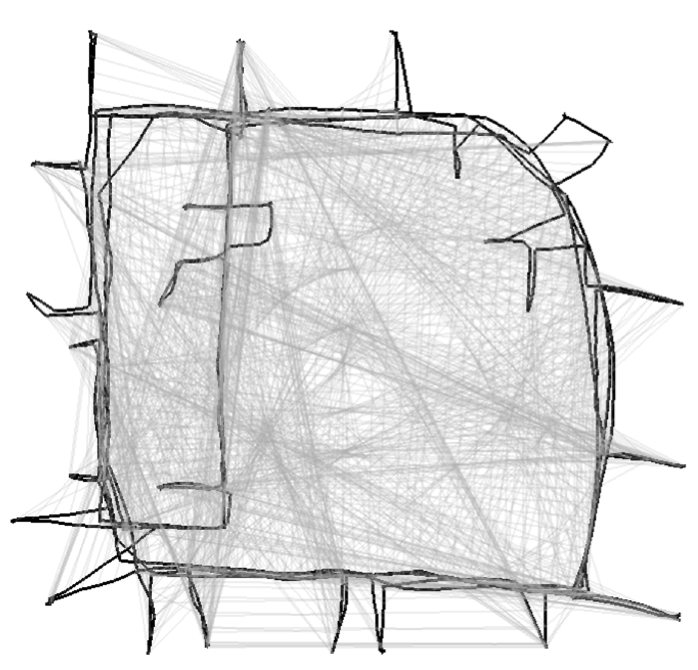
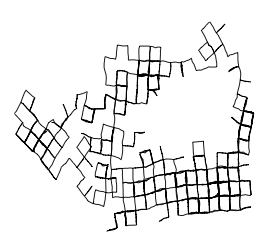
and I show how outliers in planar pose graph optimization
can be detected using convex relaxation. This builds on previous papers showing
that planar pose graph optimization can be decoupled in linear problems (with a few tricks).
Luca Carlone and Andrea Censi.
From Angular Manifolds to the Integer Lattice: Guaranteed Orientation Estimation with Application to Pose Graph Optimization.
IEEE Transactions on Robotics, April 2014.
 pdfdoi
pdfdoi supp. material
supp. material slides
slides
bibtex
@article{carlone14angular,
author = "Carlone, Luca and Censi, Andrea",
volume = "30",
doi = "10.1109/TRO.2013.2291626",
title = "{From Angular Manifolds to the Integer Lattice: Guaranteed Orientation Estimation with Application to Pose Graph Optimization}",
url = "http://www.lucacarlone.com/index.php/resources/research/mole2d",
journal = "IEEE Transactions on Robotics",
number = "4",
month = "April",
slides = "http://purl.org/censi/research/2013-mole2d-slides.pdf",
year = "2014",
pdf = "http://purl.org/censi/research/2013-mole2d.pdf"
}
Pose optimization is what is used in SLAM to optimize the map
after pose-pose and pose-features correspondences have been established.
The variables in this problem are poses living
on the nodes of a graph, and measurements are relative measurements
along the graph edges. The
problem is hard because orientations live on a manifold
with nontrivial topology, which makes the problem
nonlinear, nonconvex, and with multiple minima.
Luca and I try to solve the subproblem of orientation estimation.
We find a way to convert
the problem to an unconstrained optimization problem on integers.
This makes it possible to solve the problem globally
and return all likely guesses for the orientation.
read more...
Andrea Censi.
Kalman filtering with intermittent observations: convergence for semi-markov chains and an intrinsic performance measure.
IEEE Transactions on Automatic Control, February 2011.
pdfdoi
bibtex
@article{censi11kf,
author = "Censi, Andrea",
doi = "10.1109/TAC.2010.2097350",
title = "Kalman filtering with intermittent observations: convergence for semi-Markov chains and an intrinsic performance measure",
journal = "IEEE Transactions on Automatic Control",
issn = "0018-9286",
month = "February",
year = "2011",
pdf = "http://purl.org/censi/research/2011-tac-kf-geometry.pdf",
sortyear = "2010"
}
This paper considers the problem of linear filtering over unreliable
channels. Previous research by Sinopoli et al. has shown that there
is a threshold on the observations arrival probability that distinguishes
between a "stable" and an "unstable" behavior. This paper shows that
those conclusions are misleading and only depend on a particular
choice of the loss function. In fact, the probability distribution
of the filter state exists for each nonzero arrival probability.

Andrea Censi.
On the performance of Kalman filtering with intermittent observations: a geometric approach with fractals.
In Proceedings of the American Control Conference (ACC). St. Louis, Missouri, June 2009.
pdfdoi supp. material slides
bibtex
@inproceedings{censi09fractals,
author = "Censi, Andrea",
doi = "10.1109/ACC.2009.5159869",
title = "On the performance of {K}alman filtering with intermittent observations: a geometric approach with fractals",
url = "http://purl.org/censi/2008/fractals",
booktitle = "Proceedings of the American Control Conference (ACC)",
year = "2009",
month = "June",
slides = "http://purl.org/censi/research/2009-acc-fractals-slides.pdf",
address = "St. Louis, Missouri",
pdf = "http://purl.org/censi/research/2009-acc-fractals.pdf",
abstract = "This paper describes the stationary distribution of the a-posteriori covariance matrix of a Kalman filter when the availability of measurements is subject to random phenomena such as lossy network links. If a certain non-overlapping condition is satisfied, the cdf has a fractal nature, and there exists a closed-form expression for it. If the condition is not satisfied, deciding whether the cdf is singular or not, even in the scalar case, is at least as hard as some open problems in measure and number theory."
}

Andrea Censi and Richard M. Murray.
Real-valued consensus over noisy quantized channels.
In Proceedings of the American Control Conference (ACC). St. Louis, Missouri, June 2009.
pdfdoi supp. material slides
bibtex
@inproceedings{censi09consensus,
author = "Censi, Andrea and Murray, Richard M.",
doi = "10.1109/ACC.2009.5159872",
title = "Real-valued consensus over noisy quantized channels",
url = "http://purl.org/censi/2008/consensus",
booktitle = "Proceedings of the American Control Conference (ACC)",
year = "2009",
month = "June",
slides = "http://purl.org/censi/research/2009-acc-consensus-slides.pdf",
address = "St. Louis, Missouri",
pdf = "http://purl.org/censi/research/2009-acc-consensus.pdf",
abstract = "This paper concerns the average consensus problem with theconstraint of quantized communication between nodes. Abroad class of algorithms is analyzed, in which thetransmission strategy, which decides what value tocommunicate to the neighbors, can include various kinds ofrounding, probabilistic quantization, and bounded noise.The arbitrariness of the transmission strategy iscompensated by a feedback mechanism which can beinterpreted as a self-inhibitory action. The result is thatthe average of the nodes state is not conserved acrossiterations, and the nodes do not converge to a consensus;however, we show that both errors can be made as small asdesired. Bounds on these quantities involve the spectralproperties of the graph and can be proved by employingelementary techniques of LTI systems analysis."
}
How to reach a consensus if you and your friends are a bunch of spiking
neurons.
read more...