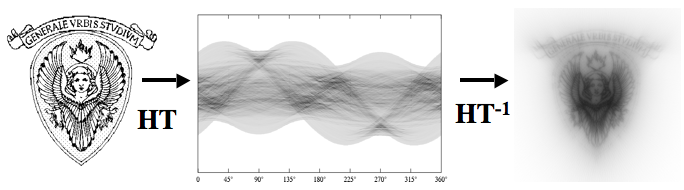
Scan matching in the Hough domain.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2739–2744. Barcelona, Spain, 2005.
 pdfdoi
pdfdoi supp. material
supp. material slides
slides


The research work I did for my bachelor thesis resulted in a novel scan matching algorithm called Hough Scan Matching that DOES NOT require line features. Its main characteristics are the possibilities to do global and multimodal searches, to work in unstructured environments and with very noisy sensors. It is provably complete for exact input.
Additional material:
- A Matlab implementation is available (ZIP). You can see the online docs.
-
My bachelor thesis (extended paper) (PDF, 2MB).
Slides, in italian with movies (zip,ppt+mpg, 17MB), or without without (zip,ppt, 5MB).