These are slides for recent talks I gave. I aim to make public all slides from all public talks; if one is not included, feel free to ask.
“Monotone Co-Design Problems: or, everything is the same”
.



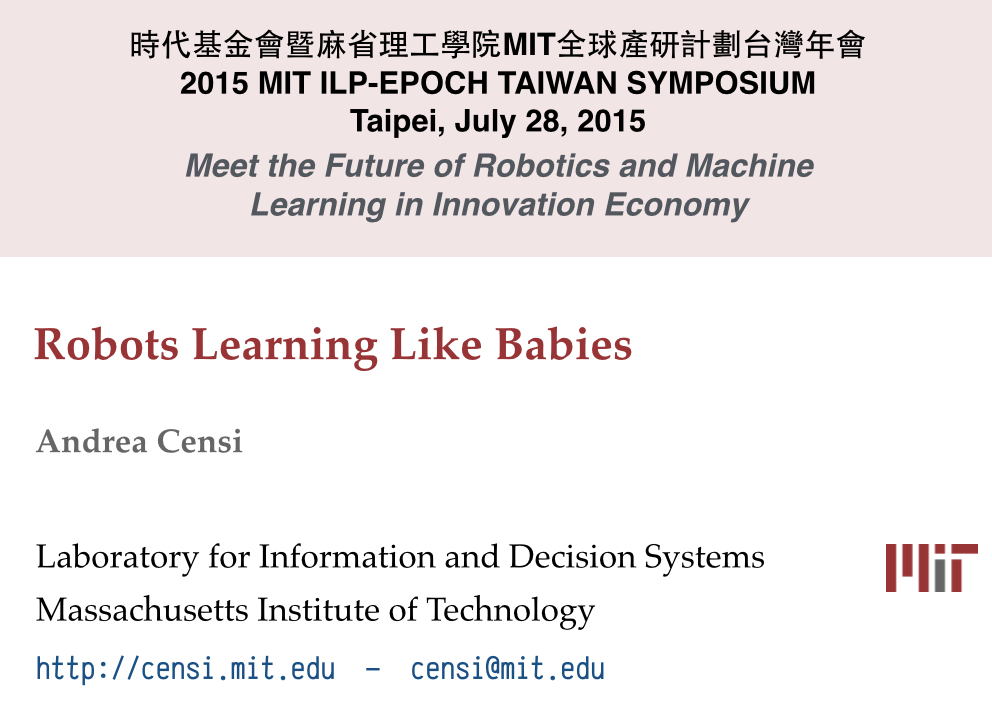
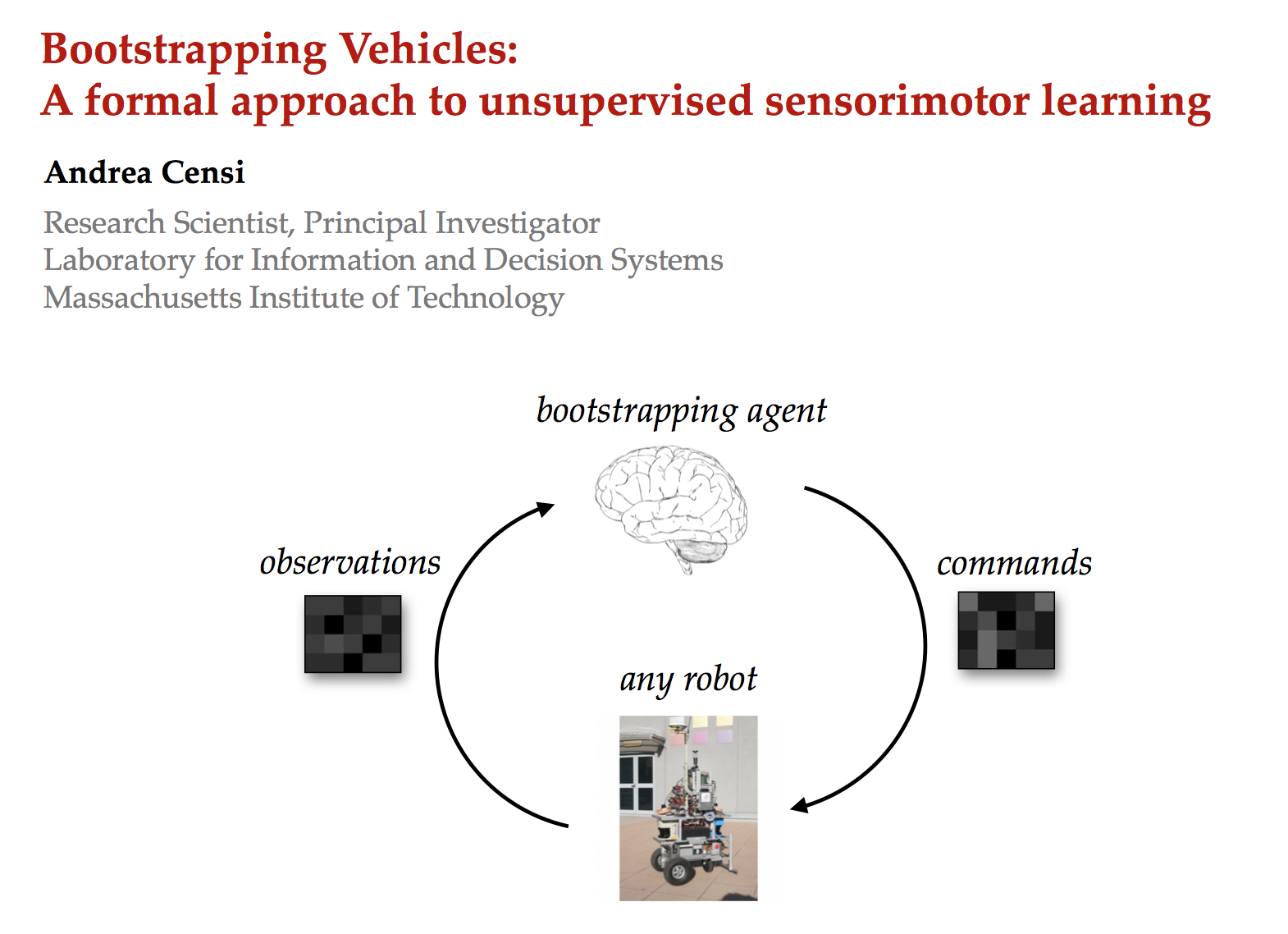
“Robots Learning like Babies”, presented at
the 2015 Taipei ILP-Epoch Foundation workshop on Meet the future of robotics and machine learning in the innovation economy.
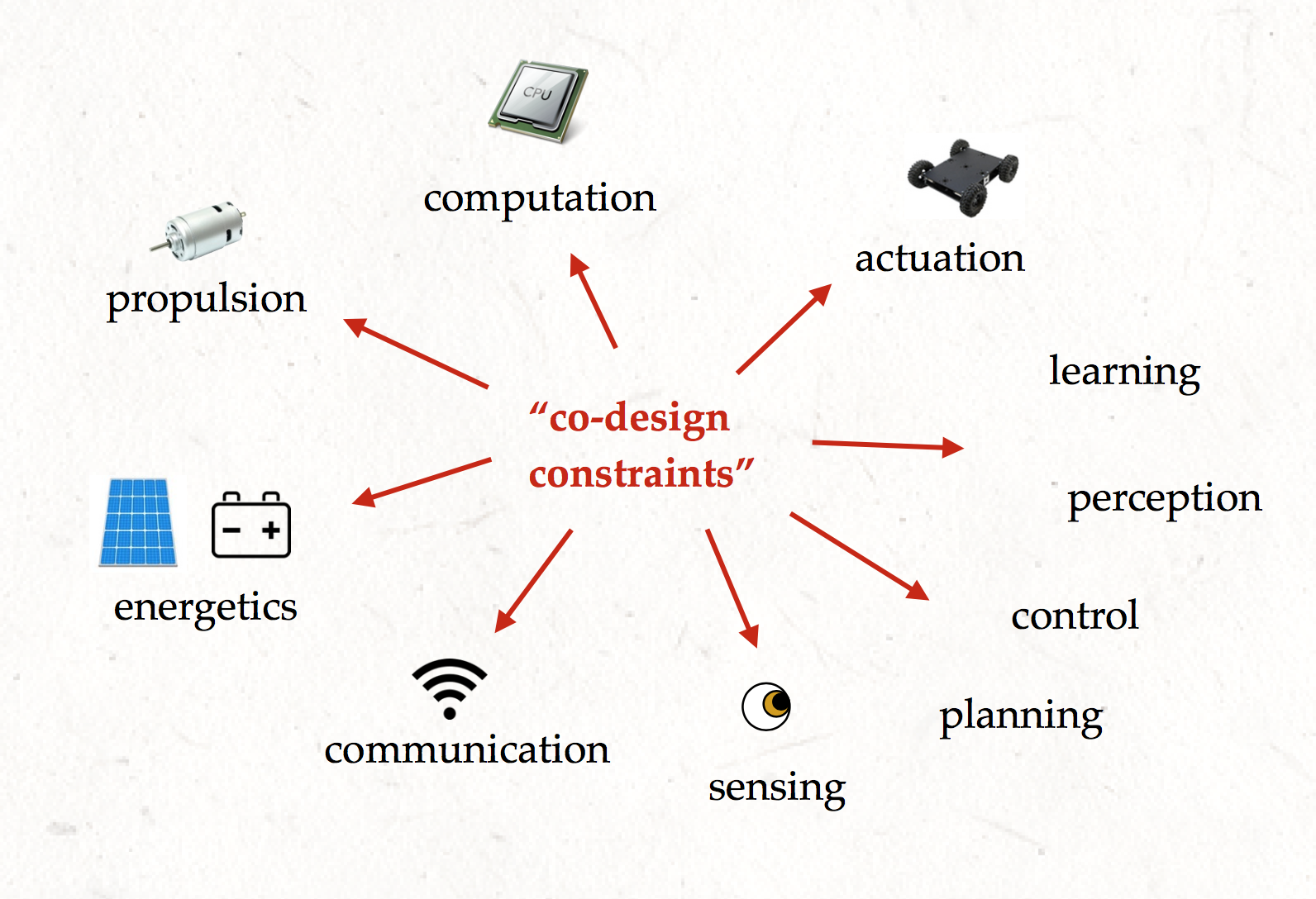
“Co-design of sensing, computation, and actuation”, presented at
ICRA 2015 in the workshop on Beyond Geometric Constraints: Planning for Solving Complex Tasks, Reducing Uncertainty, and Generating Informative Paths & Policies, but really an ad for The Big Questions in Robotics
RSS 2015 workshop.
A recent talk (May 2015) about my learning work.
“PyContracts”, presented at the Boston Python User Group.
See docs at: http://andreacensi.github.io/contracts/.
“20 Years of Vehicles at CDS, in twenty-five minutes and zero formulas”, presented at
the CDS@20 workshop celebrations
(CDS@20, Murray@50+ε, Doyle@60,
Åström@80).
“All you need is love (of data)”,
presented at the ICRA 2014 OMNIVIS Workshop
on Non-classical Cameras, Camera Networks and Omnidirectional Vision. The main reference is
this paper on calibration by correlation and
this paper about the DVS.
“Joint Inference and Control: Opportunities and Challenges” presented at the ICRA 2014
Joint Inference and Control Workshop.
“Low-latency Event-based Visual Odometry”,
presented at ICRA 2014 as a
regular paper.